
當一個人想動,卻動不了
腦機介面如何讀取與寫入大腦訊號,替被困住的意圖開一條新出口,並讓人腦與機器在閉環中共同學習。
當一個人想動,卻動不了
二○○六年,一位因脊髓損傷而四肢癱瘓的年輕人,坐在實驗室裡,盯著電腦螢幕上的游標。他的手臂無法動彈,但他「想像」自己伸手去移動那個游標。就在這一刻,植入他大腦運動皮質(motor cortex)的一小片電極,捕捉到了一群神經元的放電;一台電腦把這些放電訊號即時翻譯成指令,螢幕上的游標真的動了起來——而且方向,正是他想去的方向。
這是腦機介面(Brain-Machine Interface, BMI,又稱 Brain-Computer Interface, BCI)史上一個被反覆引用的里程碑,發表在二○○六年的《Nature》上。它之所以撼動人心,不只是因為一個無法動的人「用念頭」操控了機器,而是因為它證明了一件更深刻的事:即使連接大腦與肌肉的線路斷了,產生「想動」這個意圖的神經訊號,依然好端端地存在於皮質裡,只是無處可去。 腦機介面做的,就是替這個被困住的訊號,開一條新的出口。
從那之後,這個領域走得很遠。今天的腦機介面不只能讓癱瘓者移動游標、操控機械手臂、甚至重新「說話」,研究者也開始反過來問:我們能不能不只「讀取」大腦,還能「寫入」大腦——把資訊直接送進去?本文要帶你看的,正是這項讀寫大腦訊號的前沿技術:它的神經基礎是什麼、訊號怎麼被讀出與寫入、走到了哪裡,又還有哪些難關。
什麼是腦機介面?先把「迴路」看清楚
腦機介面,簡單說,是一條繞過正常神經肌肉路徑、直接連接大腦與外部裝置的人工通道。要理解它,先回想一下正常情況下「想動手」這件事是怎麼發生的。
你的意圖在大腦皮質形成,運動皮質的神經元發放動作電位(action potential),訊號沿著皮質脊髓束(corticospinal tract)下行,經過脊髓的運動神經元,最後抵達肌肉,肌肉收縮,手就動了。這是一條精密的生物線路。但對脊髓損傷、中風、肌萎縮性脊髓側索硬化症(ALS,俗稱漸凍症)的患者來說,這條線路在某個環節斷了——大腦的指令發得出來,卻傳不到肌肉。
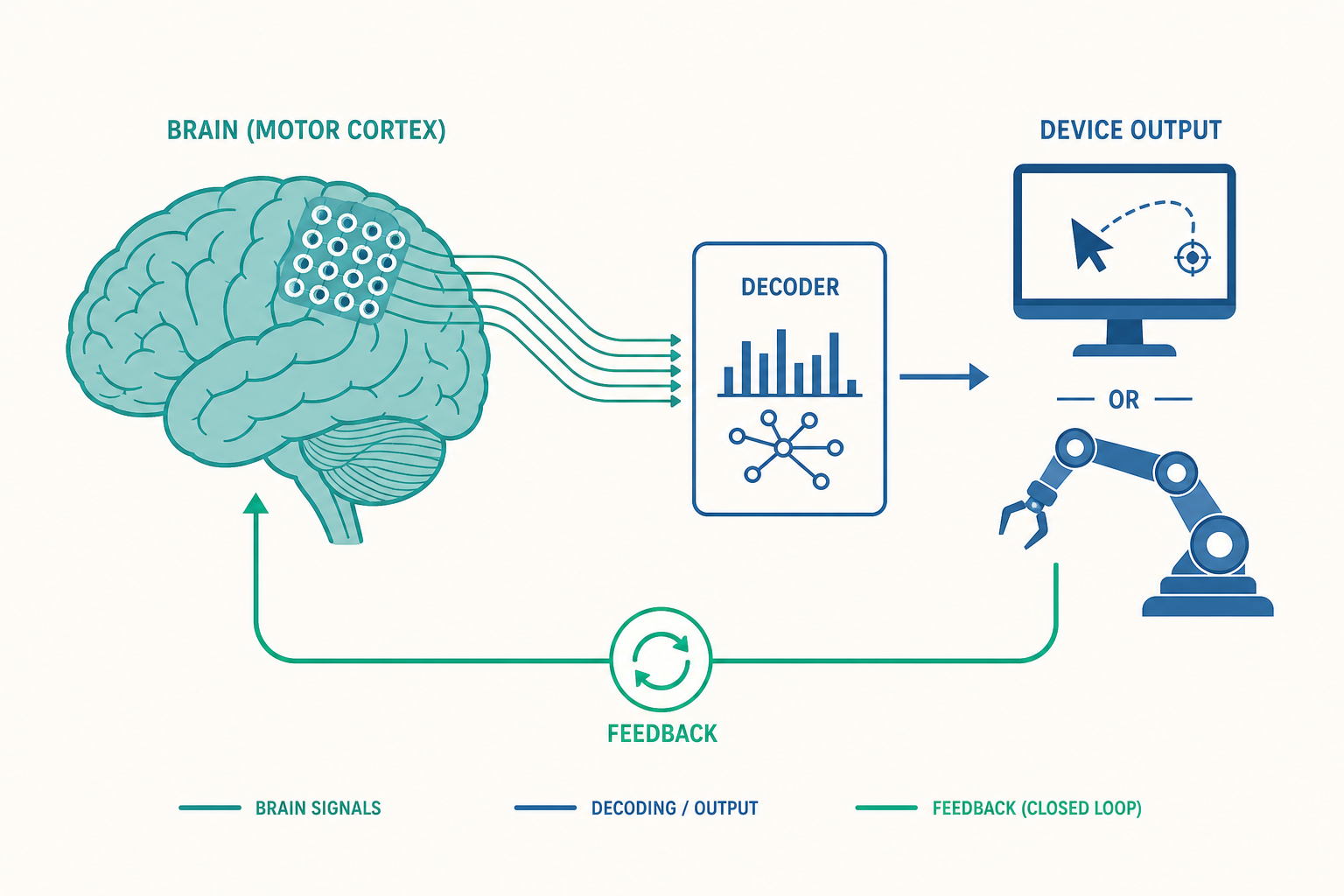
腦機介面的核心策略,是在「指令還沒斷掉」的那一端把它攔截下來。一個典型的腦機介面有四個環節:
- 訊號擷取(acquisition):用感測器記錄大腦活動。
- 訊號處理與解碼(decoding):把雜亂的神經訊號,翻譯成有意義的意圖(例如「向右」「點擊」「字母 H」)。
- 裝置控制(effector):把解碼出的意圖,送去驅動游標、機械手臂、輪椅或語音合成器。
- 回饋(feedback):使用者看到、聽到或感覺到結果,再調整自己的「想法」——這一步至關重要,我們稍後會看到它為何是整個系統能運作的關鍵。
值得先釐清一個常見迷思:腦機介面不是「讀心術」。它讀不出你腦中的祕密念頭,也無法解析任意的思緒。它能做的,是辨識特定、受過訓練的神經活動模式——通常是與運動意圖、注意力或特定刺激相關的、可重複的訊號。它更像是在大腦裡安裝了一個「新的肌肉群」,而你必須學會如何「收縮」它。
怎麼把訊號讀出來?侵入與非侵入的取捨
要讀大腦,第一個問題是:感測器放在哪裡?這個選擇,決定了訊號的品質與風險的高低,是腦機介面最核心的工程權衡(trade-off)。
非侵入式(non-invasive)把感測器放在頭皮外。最常見的是腦電圖(EEG, electroencephalography),它用貼在頭皮上的電極,記錄大量神經元同步活動產生的電場。優點是安全、便宜、不必開刀;缺點是訊號要先穿過頭骨與頭皮,被嚴重模糊與衰減,就像隔著一堵厚牆聽一個球場裡幾萬人的喧嘩——你能聽出「全場歡呼」或「全場安靜」,卻分不清任何一個人在喊什麼。因此 EEG 的空間解析度(spatial resolution)很差,只能捕捉到大尺度的群體節律。
侵入式(invasive)則把電極直接植入腦內。其中又有層次之分:皮質腦電圖(ECoG, electrocorticography)把電極陣列鋪在皮質表面(硬腦膜下),訊號品質比 EEG 好得多;而微電極陣列(microelectrode array),例如著名的「猶他陣列」(Utah array),則是一小片插滿上百根針狀電極的晶片,直接刺進皮質,能記錄到單一神經元的放電。這種單神經元層級的訊號,正是前面那位癱瘓者能精準控制游標的關鍵——解析度愈高,能解碼出的意圖就愈細膩。
這裡藏著一個無法迴避的張力:訊號品質愈好,侵入性與風險也愈高。 開顱手術、植入物可能引發感染、免疫反應,而最棘手的是長期穩定性問題——大腦會把植入的電極視為異物,周圍逐漸形成膠質瘢痕(glial scar),把電極「包覆」起來,使得訊號隨著月份、年份過去而逐漸衰減。如何讓植入物與腦組織長期和平共處,是這個領域至今最硬的工程難題之一。
近年新一代的侵入式技術,例如以「神經織網」(neural lace)或柔性高密度電極為設計理念的系統(如 Neuralink 等公司的探索方向,以及學術界的柔性電子研究),核心訴求正是用更細、更柔軟、生物相容性更好的電極,去緩解這個瘢痕與排斥的問題。技術路線各異,但目標一致:在安全與訊號品質之間,把那條取捨曲線往更好的方向推。
訊號讀出來了,怎麼「翻譯」成意圖?
擷取到神經訊號,只是第一步。接下來真正的魔法,發生在解碼器(decoder)裡——把一串電位變化,翻譯成「使用者想做什麼」。這正是腦機介面與人工智慧(AI)深度交會的地方。
最經典的解碼原理,建立在前面提過的群體編碼(population coding)之上。運動皮質中,單一神經元對手臂運動方向只有粗略的偏好——它在某個「偏好方向」發放得最猛,偏離這個方向就漸漸減弱,這叫「方向調諧」(directional tuning)。單看一顆神經元,你無法準確知道手要往哪動。但喬治普羅斯(Apostolos Georgopoulos)在一九八○年代提出的「群體向量」(population vector)概念告訴我們:把一整群神經元的偏好方向,依各自的發放強度加權求和,得到的合向量,竟能精準預測手臂的運動方向。
換句話說,意圖不藏在任何一顆神經元裡,而分散在整個群體的活動模式中。解碼器的工作,就是學會這個「群體模式 → 意圖」的對應關係。早期用的是相對單純的線性方法(如卡爾曼濾波器,Kalman filter,能即時融合雜訊訊號並估計手要去的位置與速度);今天則愈來愈多採用深度學習——遞迴神經網路(RNN)、Transformer 等模型,能捕捉神經活動裡複雜的時間動態,大幅提升解碼的準確率與流暢度。
這裡有一個美麗的對稱:腦機介面用 AI 來讀大腦,而 AI 本身的靈感(人工神經網路)又源自大腦。讀大腦的演算法,與大腦啟發的演算法,在這裡握手了。
但解碼器再聰明,也只是系統的一半。另一半,來自使用者的大腦本身。
為什麼說「人腦也在學」?回饋與可塑性的雙人舞
腦機介面最反直覺、也最深刻的一點是:它能運作,不只因為機器學會了讀大腦,更因為大腦學會了驅動機器。 這是一支雙人舞——機器在學,人腦也在學。
回想學騎腳踏車:一開始你歪歪扭扭,但透過不斷的回饋(身體傾斜、視覺、跌倒的痛),你的大腦逐漸調整神經輸出,最後騎得行雲流水。腦機介面的使用者,經歷的是同一個過程,只是被驅動的不是腿,而是螢幕上的游標。當使用者看到「我這樣想,游標就往左偏一點」,這個視覺回饋會驅動大腦的神經可塑性(neural plasticity)——運動皮質的神經元逐漸調整自己的發放模式,去「配合」解碼器,讓控制變得愈來愈精準、愈來愈自然。
研究者甚至觀察到,經過長期訓練,原本控制手臂的神經元群,會發展出一套穩定的、專屬於控制游標的新活動模式,彷彿大腦真的長出了一塊「虛擬肌肉」的神經表徵。這正是前面強調「回饋是關鍵環節」的原因:沒有即時、可靠的回饋,大腦無從學習,這支雙人舞也就跳不起來。
這個現象把腦機介面與優心理(學習、技能習得、回饋的作用)和神經科學的可塑性研究緊緊綁在一起。它告訴我們:一個好的腦機介面,不該是「機器單方面去破解大腦」,而應是「打造一個讓人腦與機器能共同學習、彼此適應」的閉環系統(closed-loop system)。最前沿的研究,正是讓解碼器的學習與大腦的學習協同進行,兩者一起收斂到一個雙方都得心應手的控制策略。
不只「讀」,還能「寫」嗎?
到此為止,我們談的都是「讀取」——把大腦的訊號讀出來。但本文開頭提過,腦機介面的另一個前沿是「寫入」:能不能把資訊直接送進大腦,繞過眼睛、耳朵這些天然的感官入口?
這並非科幻。有一個已經改變數十萬人生命的成熟案例:人工電子耳(cochlear implant)。對於耳蝸毛細胞受損的重度聽損者,人工電子耳把聲音轉成電脈衝,直接刺激聽神經,讓大腦「聽見」聲音。它正是一個典型的、已臨床普及的「寫入」介面——只是寫入的對象是周邊神經,而非中樞皮質。類似地,視覺假體(visual prosthesis)試圖用電刺激視網膜或視覺皮質,讓失明者感知到光點。
把寫入推進到大腦皮質,最具雄心的應用是感覺回饋(sensory feedback)。想像一位用腦機介面操控機械手臂的癱瘓者:他能讓機械手去抓杯子,卻「感覺不到」自己抓到了——因為機械手沒有觸覺,訊號回不到他的大腦。於是研究者嘗試在機械手指尖裝壓力感測器,再把感測訊號轉成電刺激,送進使用者的體感皮質(somatosensory cortex)。二○一六年發表於《Science Translational Medicine》的研究顯示,受試者真的「感覺到」了被觸碰的手指——儘管那是一隻機械手。這讓腦機介面從一條「單向的輸出管道」,朝向一個「能輸出也能輸入」的真正雙向閉環邁進。
不過必須誠實:寫入比讀取困難得多。讀取只需「旁聽」神經活動,寫入卻要用人工的電刺激,去「冒充」大腦本來精密、分散、由成千上萬神經元協同產生的自然編碼。我們對自然神經編碼的理解還遠遠不夠,因此目前寫入能傳遞的資訊還相當粗略。把複雜的視覺場景、抽象的概念「寫」進大腦,仍是非常遙遠的目標。
看一個例子
讓我們用一個近年最動人的應用,把前面的概念串起來——讓失語者重新「說話」的語音腦機介面(speech BMI)。
故事的主角,是一些因腦幹中風或漸凍症而失去說話能力的患者。他們的心智清明、想說的話一清二楚,卻因為控制嘴唇、舌頭、喉嚨的神經肌肉路徑癱瘓,一個字也發不出來——這正是本文開頭那個主題的回響:意圖還在,出口斷了。
研究者(如加州大學舊金山分校與史丹佛大學的團隊,相關成果於二○二一至二○二三年陸續發表於《Nature》《New England Journal of Medicine》等期刊)在患者試圖說話時的腦區——控制發聲器官的運動皮質——植入了高密度電極陣列。請注意這個巧妙的設計:他們解碼的不是抽象的「想說的詞」,而是大腦對「發音動作」的運動指令。即使嘴巴不能動,當患者「試圖」說出某個字,運動皮質依然會發出控制嘴唇舌頭的那套神經訊號。
接下來,每一個環節我們都見過了: - 訊號擷取——侵入式高密度電極記錄發聲運動皮質的群體活動; - 解碼——深度學習模型(RNN/Transformer)即時把這些神經活動,翻譯成音素(phoneme)序列,再組合成詞句,並結合語言模型(與大型語言模型同源的技術)來提升流暢度與準確率; - 裝置控制——輸出的文字被送去語音合成器,甚至能合成出貼近患者本人原本嗓音的聲音; - 回饋——患者在螢幕上即時看到自己「說」出的句子,據此微調,大腦的可塑性也參與進這個閉環。
最新的成果已能達到每分鐘數十個字、涵蓋上千甚至更大詞彙量的解碼速度,雖然仍有錯誤率,但對一位多年無法溝通的患者而言,這是從「完全沉默」到「能重新對話」的天壤之別。
這個例子完整走過了腦機介面的每一層:從神經基礎(運動皮質即使在癱瘓後仍保留發聲意圖的編碼)→ 訊號擷取(侵入式高密度電極)→ AI 解碼(深度學習+語言模型)→ 裝置輸出(語音合成)→ 回饋與可塑性(患者與系統共同學習)。它也漂亮地連結了優神經科學、優心理與 AI 三個維度,示範了讀寫大腦這項前沿技術,如何真實地改變一個人的生命。
重點回顧
- 腦機介面是繞過神經肌肉路徑、直接連接大腦與外部裝置的人工通道,核心包含訊號擷取、解碼、裝置控制與回饋四個環節;它不是讀心術,而是辨識特定、可訓練的神經活動模式。
- 訊號擷取存在核心取捨:非侵入式(如 EEG)安全但解析度差,侵入式(如猶他微電極陣列)能讀到單神經元卻有手術風險與長期穩定性(膠質瘢痕)的難題。
- 解碼依賴群體編碼原理:意圖分散在一群神經元的活動模式中,透過群體向量、卡爾曼濾波器到深度學習模型,把神經訊號翻譯成意圖——這是腦機介面與 AI 的深度交會點。
- 回饋與神經可塑性是「雙人舞」:腦機介面能運作,不只因為機器學會讀大腦,更因為大腦透過回饋學會驅動機器,兩者在閉環中共同適應。
- 「寫入」是另一前沿:人工電子耳是成熟的寫入案例,體感皮質刺激能為機械手臂帶回觸覺;但用人工電刺激冒充自然神經編碼,難度遠高於讀取。
深入探討(研究所視角)
對有志於進一步鑽研的同學,腦機介面有幾條值得關注的前沿與爭論。
第一,長期穩定性與「神經漂移」(neural drift)。 即使解決了膠質瘢痕問題,還有一個更微妙的挑戰:同一群神經元的活動模式,會隨著日子、甚至一天之內的不同時段而緩慢改變。今天訓練好的解碼器,明天可能就「對不上」了。如何讓解碼器自動適應這種漂移——例如用無監督式的自我校準、或讓系統在使用中持續線上學習——是當前讓腦機介面走出實驗室、走向日常可用的關鍵研究。這也呼應了計算神經科學中「神經群體動態」(neural population dynamics)的觀點:與其追蹤每顆神經元,不如理解整個群體在低維流形(manifold)上的軌跡,而這個流形往往比單顆神經元的活動穩定得多。
第二,侵入式與非侵入式的長期路線之爭。 侵入式訊號品質高,但需要手術、面對植入物風險,難以大規模普及;非侵入式安全易用,卻受限於頭骨對訊號的模糊。中間地帶的技術——例如經血管植入(如 Stentrode,把電極隨支架經血管送入腦部,避免開顱)、功能性近紅外光譜(fNIRS)、聚焦超音波等——正試圖在風險與性能之間開闢新路。哪條路線最終能勝出,取決於不同應用對「解析度」與「可及性」的不同需求。
第三,閉環與適應性刺激的臨床擴展。 腦機介面的「寫入」能力,已在治療領域開花結果。深部腦刺激(DBS, deep brain stimulation)長年用於帕金森氏症,而新一代的「閉環 DBS」會即時偵測異常的腦部活動(如癲癇發作前兆或帕金森的病理性節律),只在需要時才給予刺激,而非持續放電。這把「讀」與「寫」整合進同一個自我調節的迴路,是腦機介面從「輔助溝通」走向「治療性神經調控」的重要方向。
最後,倫理、隱私與「神經權利」(neurorights)。 當技術能讀取、甚至影響大腦活動,一連串前所未有的問題隨之而來:神經資料是誰的?它比任何資料都更貼近一個人的內在自我,該如何保護心智隱私(mental privacy)?若刺激改變了一個人的情緒或決策,他的「自主性」(autonomy)與「身分認同」如何界定?國際上已有學者倡議將「神經權利」納入人權框架,部分國家也開始立法。對腦機介面而言,技術的突破與倫理的審慎必須並行——這也正是 Educational Omics 框架中 Ethicomics(倫理規範)維度所關切的核心。讀寫大腦的能力愈強,我們愈需要謹慎地問:為了誰、用在哪、由誰把關。