
為什麼旋轉的硬幣會「站」得比靜止更穩?剛體動力學的反直覺世界
從慣性張量、尤拉方程到陀螺進動與科氏力,深入剛體轉動如何違反直覺卻支撐起飛輪、陀螺儀與衛星姿態控制。
為什麼旋轉的硬幣會「站」得比靜止更穩?剛體動力學的反直覺世界
讓一枚硬幣平躺在桌上,它一碰就倒;但讓它快速旋轉,它卻能立著轉好幾秒,甚至在傾斜時自己「拉回來」一點。同樣一枚硬幣,唯一的差別是它正在自轉,憑什麼旋轉就能讓它對抗重力的傾倒?再想一個更貼近工程的場景:高速行駛的機車為什麼放手後反而比慢速更不容易倒?飛輪、陀螺儀、硬碟主軸、無人機的轉子——這些每天運轉的機械,背後都站著同一套入門篇來不及展開的理論:剛體動力學(rigid body dynamics)。
入門篇我們把物體當成一個沒有大小的「質點(particle)」,只談平移(translation)。但真實的機械零件會轉,而一旦物體有了形狀與轉動,動力學的面貌就徹底改變:質量不再是一個單純的純量,而升級成一個有方向性的慣性張量(inertia tensor);角速度與角動量竟然可以不平行;穩定的旋轉軸只有特定幾個。本文要帶已讀過入門篇的你,從「轉動的牛頓第二定律」出發,一路走到尤拉方程(Euler's equations)、陀螺效應與旋轉參考系裡的「假想力」,看看為什麼旋轉的世界如此違反直覺,又如此實用。
從 F = ma 到 τ = Iα:轉動的第二定律與它的陷阱
入門篇的核心是 $\vec{F}_{\text{net}} = m\vec{a}$。對轉動,存在一個形式上對稱的版本。把線量換成角量:力 $\vec{F}$ 換成力矩(torque) $\vec{\tau} = \vec{r} \times \vec{F}$,速度換成角速度 $\vec{\omega}$,加速度換成角加速度 $\vec{\alpha}$,而質量 $m$ 換成轉動慣量(moment of inertia) $I$。對一個繞固定軸轉動的剛體:
$$ \tau = I\alpha, \qquad I = \int r^2 \, dm $$
轉動慣量 $I$ 衡量的是物體「抗拒轉動狀態改變」的程度,它不只看質量大小,更看質量離轉軸有多遠——因為積分裡是 $r^2$。這解釋了為什麼花式溜冰選手收手就轉得更快:手臂收近轉軸,$I$ 變小,而角動量(angular momentum) $L = I\omega$ 守恆,於是 $\omega$ 必須變大。
但這裡藏著一個入門篇沒提醒、卻是進階剛體動力學的關鍵陷阱:$\tau = I\alpha$ 這個純量形式,只在物體繞「固定的、且是對稱的」主軸轉動時才成立。 一旦轉軸方向會在空間中改變(陀螺、萬向接頭、傾斜的轉子),$I$ 就不能再當成一個數字。我們需要更一般的角動量定義:
$$ \vec{\tau}_{\text{net}} = \frac{d\vec{L}}{dt}, \qquad \vec{L} = \mathbf{I}\,\vec{\omega} $$
這裡的 $\mathbf{I}$ 是一個 $3\times 3$ 的矩陣——慣性張量。注意這個微分形式才是轉動版牛頓定律的「正本」,正如入門篇強調火箭要用 $\vec{F}=d\vec{p}/dt$ 而非 $m\vec{a}$ 一樣,這裡也是「角動量的變化率等於力矩」才是普適真理。
慣性張量:當「質量」變成一個矩陣
為什麼轉動需要一個矩陣?因為一個有形狀的物體,繞不同方向的軸轉動,難易程度不同(想想一本書繞長邊、短邊、或對角線翻轉的差異)。慣性張量把這種「方向相依性」完整編碼:
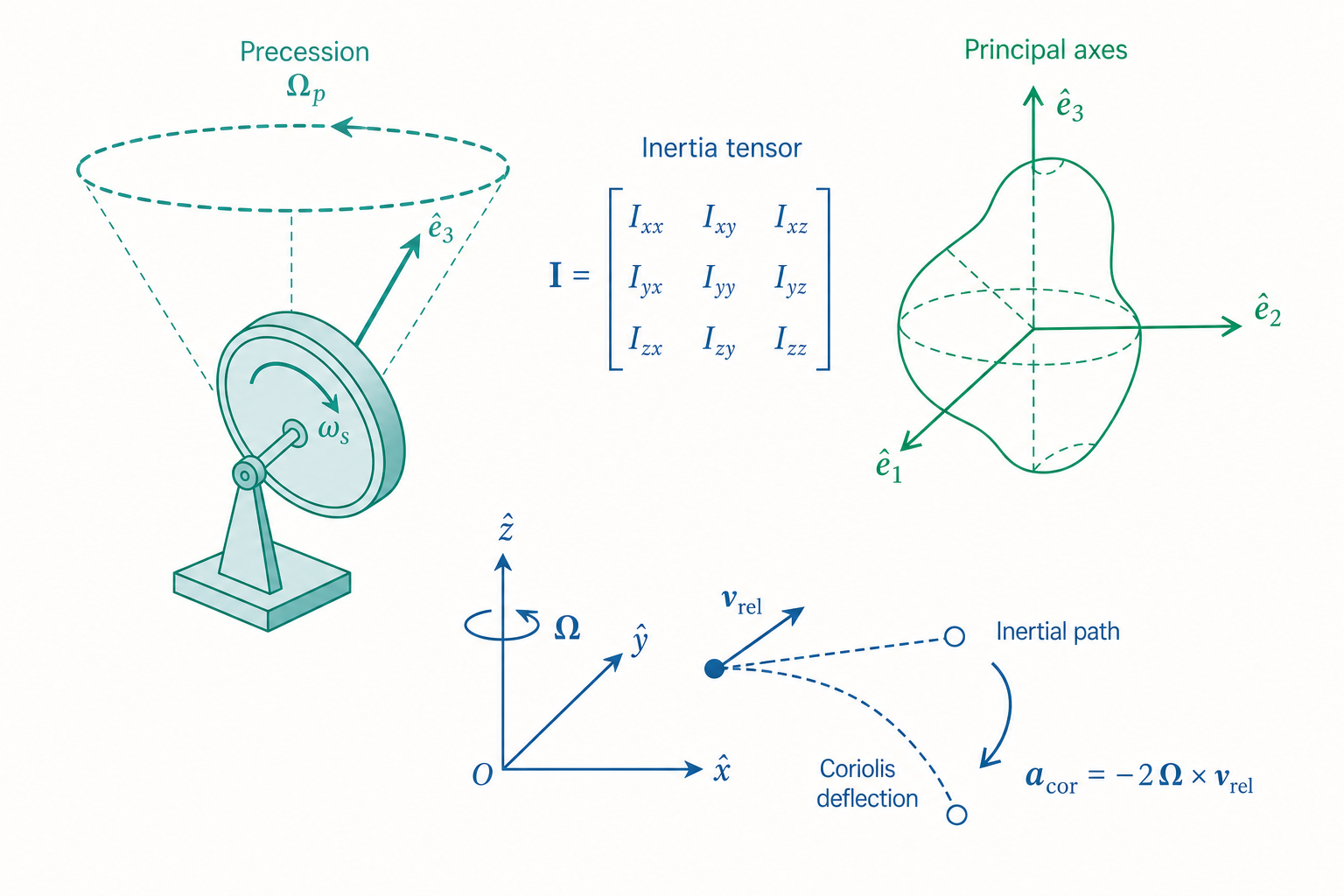
$$ \mathbf{I} = \begin{bmatrix} I_{xx} & -I_{xy} & -I_{xz} \\ -I_{xy} & I_{yy} & -I_{yz} \\ -I_{xz} & -I_{yz} & I_{zz} \end{bmatrix} $$
對角線元素如 $I_{xx} = \int (y^2 + z^2)\,dm$ 是對各軸的轉動慣量;非對角線的 $I_{xy} = \int xy\,dm$ 稱為慣性積(products of inertia),它衡量質量分布相對於座標軸的「不對稱程度」。
慣性積帶來的後果非常深刻:當 $\mathbf{I}$ 的非對角項不為零時,$\vec{L} = \mathbf{I}\vec{\omega}$ 意味著角動量 $\vec{L}$ 與角速度 $\vec{\omega}$ 一般並不平行。換句話說,物體繞某個方向轉,它的角動量卻指向另一個方向。這正是高速旋轉的零件若質量分布不對稱,會產生劇烈振動與軸承負荷的根本原因——這就是工程上動平衡(dynamic balancing)要解決的問題,也是汽車輪胎要「打平衡」的理論依據。
幸運的是,線性代數保證:對任何剛體,總能找到一組特殊的座標軸,使慣性張量變成對角矩陣。這組軸叫主慣性軸(principal axes),對角元素 $I_1, I_2, I_3$ 叫主慣性矩(principal moments of inertia)。在主軸座標下:
$$ L_1 = I_1\omega_1, \quad L_2 = I_2\omega_2, \quad L_3 = I_3\omega_3 $$
從數學上看,主慣性矩就是慣性張量的特徵值(eigenvalues),主軸就是特徵向量(eigenvectors)。這是線性代數在力學裡最漂亮的應用之一——抽象的對角化,對應到物理上「最自然的轉動方向」。設計旋轉機械時,工程師總是想辦法讓轉軸落在主軸上,以消除振動。
看一個例子:平行軸定理與飛輪儲能
問題:一個鋼製實心圓盤飛輪(flywheel),質量 $m = 50\ \mathrm{kg}$、半徑 $R = 0.30\ \mathrm{m}$,繞通過質心的中心軸旋轉。(a)求其轉動慣量;(b)若要在 $t = 4\ \mathrm{s}$ 內從靜止加速到 $3000\ \mathrm{rpm}$,需要多大的力矩?(c)此時儲存了多少轉動動能?
(a)轉動慣量。 實心圓盤繞中心軸的公式為 $I = \tfrac{1}{2}mR^2$:
$$ I = \tfrac{1}{2}(50)(0.30)^2 = \tfrac{1}{2}(50)(0.09) = 2.25\ \mathrm{kg\cdot m^2} $$
(b)所需力矩。 先把轉速換成角速度。$3000\ \mathrm{rpm} = 3000 \times \dfrac{2\pi}{60} = 314.2\ \mathrm{rad/s}$。角加速度:
$$ \alpha = \frac{\omega - \omega_0}{t} = \frac{314.2 - 0}{4} = 78.5\ \mathrm{rad/s^2} $$
由 $\tau = I\alpha$(這裡轉軸固定且為對稱主軸,純量形式成立):
$$ \tau = 2.25 \times 78.5 = 176.7\ \mathrm{N\cdot m} $$
(c)儲存的轉動動能。 轉動動能公式 $E_k = \tfrac{1}{2}I\omega^2$:
$$ E_k = \tfrac{1}{2}(2.25)(314.2)^2 = \tfrac{1}{2}(2.25)(98722) \approx 1.11\times 10^5\ \mathrm{J} \approx 111\ \mathrm{kJ} $$
這 111 千焦約等於一輛 1.1 噸汽車以 50 km/h 行駛的動能,全部存在一個直徑 60 公分的鋼盤裡——這正是飛輪儲能(flywheel energy storage)的物理基礎。注意能量隨 $\omega^2$ 成長,所以提高轉速比加大質量更有效,但轉速受限於材料的離心應力(連結到「優物理」的圓周運動與「機械材料」的強度極限)。
順帶一提,若飛輪的轉軸不通過質心,要用平行軸定理(parallel axis theorem)修正:$I = I_{\text{cm}} + md^2$,其中 $d$ 是新軸到質心軸的距離。這個 $md^2$ 項,本質上和慣性積一樣,提醒我們轉動慣量永遠是「相對於某根特定軸」而言。
尤拉方程:旋轉中的剛體會「自己」搖頭
現在把所有東西放進一個在空間中自由翻滾的剛體。麻煩在於:慣性張量 $\mathbf{I}$ 是相對於物體本身定義的,當物體翻滾時,$\mathbf{I}$ 在固定(慣性)座標系裡會不斷改變。聰明的做法是把座標系綁在轉動的物體上(隨體座標系,body frame),讓 $\mathbf{I}$ 保持常數。代價是這個座標系本身在轉,微分時必須加上一項旋轉修正。結果就是著名的尤拉方程(Euler's equations):
$$ \begin{aligned} \tau_1 &= I_1\dot{\omega}_1 + (I_3 - I_2)\,\omega_2\omega_3 \\ \tau_2 &= I_2\dot{\omega}_2 + (I_1 - I_3)\,\omega_3\omega_1 \\ \tau_3 &= I_3\dot{\omega}_3 + (I_2 - I_1)\,\omega_1\omega_2 \end{aligned} $$
那些 $(I_3 - I_2)\omega_2\omega_3$ 之類的耦合項(coupling terms)是入門篇的純量 $\tau = I\alpha$ 完全看不到的。它們的物理意義驚人:即使外力矩為零($\vec{\tau}=0$),只要三個主慣性矩不相等,各軸的角速度仍會隨時間互相轉移、彼此牽動。 這就是為什麼太空中無外力的物體(如翻滾的衛星、被拋出的手機)不會乖乖繞固定軸轉,而會搖頭晃腦。
最戲劇性的後果是中間軸定理(intermediate axis theorem,又稱網球拍定理 Dennis–Đjanibekov 效應):對 $I_1 < I_2 < I_3$ 的物體,繞最大軸($I_3$)或最小軸($I_1$)旋轉是穩定的——小擾動只會讓它輕微擺動;但繞中間軸($I_2$)旋轉是不穩定的,任何微小擾動都會被放大,物體會週期性地翻轉 180 度。你拿一支網球拍,讓它繞「翻面」那根軸(中間軸)拋轉,它幾乎一定會在空中翻一圈再翻回來。穩定性分析靠的就是把尤拉方程在某個穩態解附近做線性化(linearization),檢查擾動是指數增長還是有界震盪——這套手法和「優物理」的簡諧振動、以及機械「振動學」的特徵值分析是同一個數學家族。
陀螺效應:力矩讓它「轉向」而非「倒下」
回到開頭的旋轉硬幣與高速機車。它們穩定的秘密叫陀螺進動(gyroscopic precession)。對一個高速自轉的剛體,它擁有沿轉軸的巨大角動量 $\vec{L}$。當重力試圖讓它傾倒時,重力提供的力矩 $\vec{\tau}$ 並不會直接讓 $\vec{L}$ 倒下,而是因為 $\vec{\tau} = d\vec{L}/dt$,使 $\vec{L}$ 的方向緩緩改變——轉軸於是繞著鉛直線畫圓,這就是進動。進動角速度為:
$$ \Omega_p = \frac{\tau}{L} = \frac{mgr}{I\omega} $$
關鍵洞見:自轉越快($\omega$ 越大),$L$ 越大,進動越慢,物體看起來就越「穩」。這就是旋轉硬幣不倒、轉速高的機車更穩、以及陀螺儀能維持指向的共同原因。
陀螺效應在工程上不只是把戲。控制力矩陀螺儀(Control Moment Gyroscope, CMG)正是國際太空站與許多衛星調整姿態的核心裝置——靠改變高速飛輪的指向產生反作用力矩,不需噴射推進劑。但它也帶來麻煩:船舶與飛機的高速渦輪轉子,在載具轉向時會產生額外的陀螺力矩施加在軸承上;直升機尾旋翼、甚至自行車前輪的轉向手感,都和陀螺效應糾纏在一起。理解 $\vec{\tau} = d\vec{L}/dt$ 的向量性質(力矩改變的是角動量的方向,而非僅是大小),是讀懂這些現象的唯一鑰匙。
旋轉參考系:科氏力與離心力的真相
最後一塊進階拼圖,是入門篇刻意避開的旋轉參考系(rotating reference frame)。牛頓定律只在慣性參考系裡成立。但工程上我們常想站在轉動的物體上看世界(站在旋轉平台、地球表面、離心機裡)。在這種非慣性系裡,為了讓 $\vec{F}=m\vec{a}$ 形式上還能用,必須引入假想力(fictitious forces)。對一個以角速度 $\vec{\Omega}$ 旋轉的座標系,物體的「視加速度」需要補上三項:
$$ \vec{a}_{\text{rot}} = \vec{a}_{\text{inertial}} - \underbrace{2\,\vec{\Omega}\times\vec{v}_{\text{rot}}}_{\text{科氏}} - \underbrace{\vec{\Omega}\times(\vec{\Omega}\times\vec{r})}_{\text{離心}} - \underbrace{\dot{\vec{\Omega}}\times\vec{r}}_{\text{尤拉}} $$
離心力(centrifugal force) $-m\vec{\Omega}\times(\vec{\Omega}\times\vec{r})$ 指向遠離轉軸,大小為 $m\Omega^2 r$,這正是離心機、離心泵、洗衣機脫水的原理。注意它是站在旋轉系裡才感覺到的假想力——入門篇強調過汽車過彎不是被「往外甩」,那是慣性系的觀點;但若你改站在轉動的車內(旋轉系),就「真的」會感覺到一個把你推向車門的離心力。兩種描述都對,差別只在你選的參考系。
科氏力(Coriolis force) $-2m\vec{\Omega}\times\vec{v}_{\text{rot}}$ 更微妙:它只在物體相對旋轉系運動時才出現,方向垂直於運動方向。它讓地球上的氣旋打轉、讓長程砲彈偏向、也是 MEMS 陀螺儀(你手機裡感測旋轉的晶片)的工作原理——晶片內振動的微小質量塊一旦被轉動,科氏力就會推它偏移,量這個偏移就能反推角速度。從太空站姿態控制到你掌中的手機,科氏力無處不在。
動手試試
拿一個轉椅坐上去,雙手各持一本書,手臂張開,請人推你開始旋轉。轉起來後,把雙手收到胸前——你會明顯感覺自己轉快了。這是角動量守恆($I\omega = $ 常數,$I$ 減小則 $\omega$ 增大)的親身實驗。接著在旋轉時試著把一隻手快速由內往外伸:你會感到一股奇怪的側向阻力把手「帶歪」,那就是科氏力。最後,找一個自行車前輪,握住輪軸兩端讓同伴幫你把輪子轉到高速,然後試著傾斜輪軸——你會清楚感受到輪子「抗拒」並往垂直方向「扭」過去,那就是陀螺力矩 $\vec{\tau}=d\vec{L}/dt$ 在你手中的真實觸感。
重點回顧
- 轉動的牛頓定律普適形式是 $\vec{\tau}=d\vec{L}/dt$,而 $\vec{L}=\mathbf{I}\vec{\omega}$;純量的 $\tau=I\alpha$ 只在繞固定對稱主軸時才成立,旋轉機械分析切勿濫用。
- 慣性張量是一個矩陣,質量的「方向性」由它編碼;非對角的慣性積會讓 $\vec{L}$ 與 $\vec{\omega}$ 不平行,造成振動,這是動平衡要解決的問題。對角化得到的主慣性矩與主軸,就是線性代數的特徵值與特徵向量。
- 尤拉方程的耦合項讓自由翻滾的剛體「自己搖頭」;中間軸定理指出繞最大或最小慣性軸穩定、繞中間軸不穩定,這是穩定性分析的經典案例。
- 陀螺進動 $\Omega_p = mgr/(I\omega)$ 解釋了旋轉硬幣不倒、機車高速更穩、衛星用 CMG 控姿;核心是力矩改變的是角動量的方向。
- 旋轉參考系裡的離心力與科氏力是假想力,但對離心機、氣象、MEMS 陀螺儀等真實工程不可或缺;選對參考系往往決定問題的難易。
深入探討(研究所視角)
本文用尤拉方程描述自由剛體的轉動,但你會發現一個尷尬:尤拉方程給的是各軸角速度 $\omega_i$ 的演化,卻沒直接告訴我們物體在空間中的姿態(orientation)。要把角速度積分回姿態,需要一組描述方向的參數。最直覺的是尤拉角(Euler angles)——以進動、章動、自轉三個角度($\phi, \theta, \psi$)描述剛體姿態,但它有著名的萬向鎖(gimbal lock)奇異性:當兩根軸對齊時,一個自由度會瞬間消失,導致運動方程式數值上爆炸。這正是航太與機器人界普遍改用四元數(quaternions)或旋轉矩陣的原因——四元數以四個數(一個純量加一個三維向量)平滑地參數化所有三維旋轉,無奇異性、計算高效、數值穩定,是現代飛行控制、電腦圖學與 VR 頭顯姿態追蹤的標準工具。
更深一層,本文的牛頓—尤拉路線只是剛體動力學的一種語言。對多剛體系統(multibody dynamics,如機器人手臂、車輛懸吊、引擎曲柄連桿),逐一寫尤拉方程並處理約束力會非常繁瑣。研究所階段會學到兩條更強大的路徑:其一是延續入門篇提到的拉格朗日力學,用廣義座標把約束自動內建,配合凱恩方法(Kane's method)或遞迴牛頓—尤拉演算法(recursive Newton–Euler algorithm),成為機器人即時控制的計算骨幹;其二是把剛體運動視為在李群(Lie group) $SO(3)$ 與 $SE(3)$ 上的幾何,用旋量理論(screw theory)與李代數統一描述平移與轉動,這是現代幾何力學(geometric mechanics)與機器人運動學的前沿語言。
值得體會的是,從質點到剛體、從純量轉動慣量到慣性張量、從尤拉角到四元數與李群,每一步抽象化都不是為了炫技,而是為了在更複雜的系統裡仍能寫出正確、可計算、數值穩定的方程式。建議搭配「優物理」的剛體轉動與角動量章節、以及線性代數的特徵值分解一起讀,並在機械「振動學」與「機器人學」中印證這些工具如何落地——你會發現本文那枚旋轉的硬幣,和太空站的姿態控制、你手機裡的陀螺儀晶片,講的其實是同一個故事。