
為什麼一台「會自己停下來」的電梯,比馬達本身難做?
從電梯精準停層出發,走過機電整合「感測—運算—致動」的閉環,涵蓋 ADC 解析度、直流馬達特性、PWM 與嵌入式 PID 控制。
為什麼一台「會自己停下來」的電梯,比馬達本身難做?
想像你站在電梯裡,按下了七樓。馬達轉動把轎廂往上拉,這部分其實是十九世紀就成熟的技術。真正困難的是:電梯怎麼知道自己「快到七樓了」?它如何在距離樓層還有幾公分時,把速度從每秒一公尺平滑地降到零,讓你感覺不到任何頓挫?又如何在門口有人時,立刻判斷並停止關門?
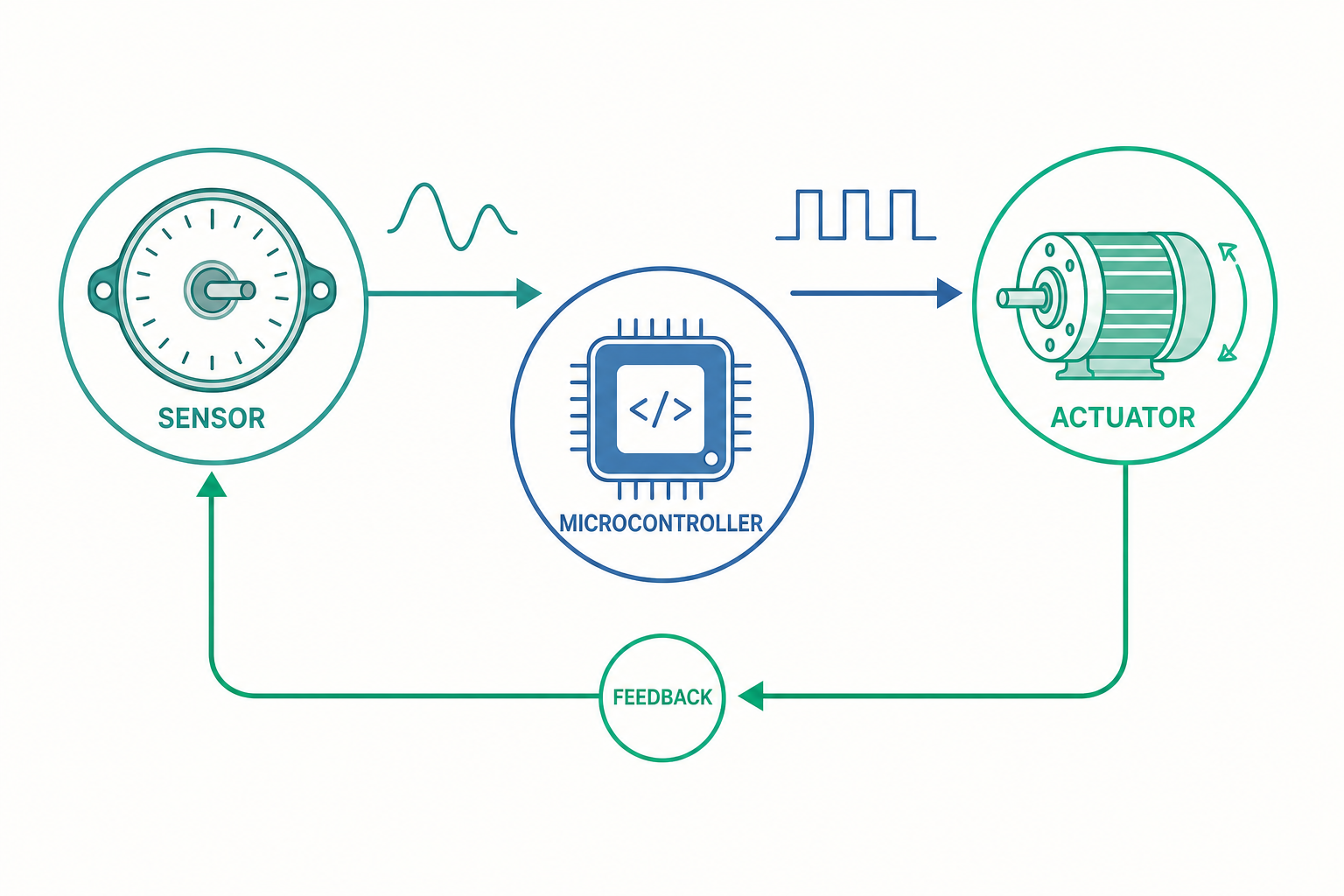
讓馬達轉動只需要「動力」(power),但讓電梯「聰明地」停在正確位置、對環境做出反應,需要的是感測(sensing)、決策(computation)與致動(actuation)三者的緊密耦合。這種把機械、電子、控制與資訊整合在一起的工程學科,就是機電整合(Mechatronics)。它不是機械加上電路那麼簡單,而是一種「讓物理系統具備感知與智慧」的設計思維。
機電整合(Mechatronics)這個詞由日本安川電機(Yaskawa)的工程師森哲郎於 1969 年提出,是 Mechanics 與 Electronics 的合成。今天,從你手機裡的光學防手震、汽車的 ABS 防鎖死煞車、到工廠的協作機器人,背後都是同一套思維:用感測器把物理世界數位化,用嵌入式運算做出決策,再用致動器把決策變回物理動作。 本文就帶你走過這個「感測—運算—致動」的閉環。
感測:把物理量變成可運算的數字
機電系統與外界互動的第一步,是「測量」。感測器(sensor)的本質是一個轉換器(transducer):把某個物理量(位置、溫度、力、加速度)轉換成電壓或電流,再經由類比數位轉換器(ADC, Analog-to-Digital Converter)變成電腦能處理的數字。
以最常見的電位計(potentiometer)位置感測為例。它是一個可變電阻,滑臂位置 $x$ 對應一個分壓輸出:
$$ V_{out} = V_{cc} \cdot \frac{x}{L} $$
其中 $L$ 是電位計全長,$V_{cc}$ 是供應電壓。若 $V_{cc} = 5\,\text{V}$、$L = 100\,\text{mm}$,當滑臂在 $x = 30\,\text{mm}$ 時,$V_{out} = 5 \times 0.3 = 1.5\,\text{V}$。
但這個類比電壓還要經過 ADC 才能進入微控制器。ADC 的解析度(resolution)由位元數 $n$ 決定。一個 $n$ 位元的 ADC 把參考電壓 $V_{ref}$ 切成 $2^n$ 個階。每一階對應的電壓量稱為最小有效位元(LSB, Least Significant Bit):
$$ \Delta V = \frac{V_{ref}}{2^n} $$
對應到位置的解析度為:
$$ \Delta x = \frac{L}{2^n} = \frac{V_{ref}}{2^n} \cdot \frac{L}{V_{cc}} $$
舉例:$V_{ref} = 5\,\text{V}$,$n = 10$ 位元(許多 Arduino 的預設),則 $2^{10} = 1024$ 階,
$$ \Delta V = \frac{5}{1024} \approx 4.88\,\text{mV}, \qquad \Delta x = \frac{100\,\text{mm}}{1024} \approx 0.098\,\text{mm} $$
也就是說,這套系統最細只能分辨約 0.1 mm 的位移。若你需要 0.01 mm 的精度,10 位元 ADC 就不夠,得換 14 位元($2^{14}=16384$ 階,$\Delta x \approx 0.006\,\text{mm}$)或改用更高解析度的感測原理(如光學編碼器)。這就是機電設計的核心權衡:感測精度、運算成本與機械需求必須一起考量,不能各自為政。
取樣定理與雜訊
感測不是「測一次就好」,而是以固定取樣頻率(sampling frequency) $f_s$ 連續測量。奈奎斯特–夏農取樣定理(Nyquist–Shannon sampling theorem) 告訴我們:要忠實還原一個最高頻率為 $f_{max}$ 的訊號,取樣頻率必須滿足
$$ f_s > 2 f_{max} $$
若取樣太慢,高頻成分會被「折疊」成低頻假訊號,這稱為混疊(aliasing)。例如要量測一個含 50 Hz 振動的訊號,$f_s$ 至少要大於 100 Hz,實務上常取 5–10 倍餘裕,設成 500 Hz。
此外,真實感測器都有雜訊。一個常見處理是移動平均濾波(moving average filter),對最近 $N$ 筆讀數取平均:
$$ y[k] = \frac{1}{N} \sum_{i=0}^{N-1} x[k-i] $$
平均能讓隨機雜訊的標準差降為原本的 $1/\sqrt{N}$,但代價是引入延遲(lag),讓系統反應變慢。$N$ 越大越平滑、卻也越遲鈍——又是一個工程權衡。
致動:把電能變成精確的機械動作
光會「感知」還不夠,機電系統必須能「動作」。致動器(actuator)把電能轉換為機械能。最普遍的是直流馬達(DC motor),它的數學模型清楚地連結了電學與力學,是機電整合最美的範例之一。
直流馬達有兩條核心方程式。第一條描述電的世界——電樞電路的電壓平衡:
$$ V = R i + L \frac{di}{dt} + K_e \omega $$
其中 $V$ 是輸入電壓、$i$ 是電樞電流、$R$ 與 $L$ 是電樞電阻與電感、$\omega$ 是轉速,而 $K_e \omega$ 是馬達轉動時產生的反電動勢(back-EMF),$K_e$ 為反電動勢常數。
第二條描述力學的世界——轉子的牛頓第二定律(旋轉版本):
$$ J \frac{d\omega}{dt} = K_t i - b\omega - \tau_{load} $$
其中 $J$ 是轉動慣量、$b$ 是黏滯阻尼係數、$\tau_{load}$ 是負載扭矩,而 $K_t i$ 是馬達產生的電磁扭矩(electromagnetic torque),$K_t$ 為扭矩常數。
值得注意的是,在 SI 單位制下,扭矩常數與反電動勢常數數值相等:$K_t = K_e \equiv K$。這不是巧合,而是能量守恆的必然結果——馬達把多少電功率轉成機械功率,這個轉換比例對「電生力」與「動生電」兩個方向是同一個常數。
在穩態(steady state)下,$di/dt = 0$ 且 $d\omega/dt = 0$,我們可以推導出馬達最重要的特性:扭矩–轉速關係。由第一式(穩態)得 $i = \dfrac{V - K\omega}{R}$,代入第二式(穩態、忽略黏滯)得:
$$ \tau = K i = \frac{K V}{R} - \frac{K^2}{R}\omega $$
這是一條負斜率直線:轉速越高,可輸出的扭矩越小。兩個端點特別有意義:
- 失速扭矩(stall torque),$\omega = 0$ 時:$\tau_{stall} = \dfrac{KV}{R}$
- 空載轉速(no-load speed),$\tau = 0$ 時:$\omega_{NL} = \dfrac{V}{K}$
舉個具體例子:某直流馬達 $K = 0.05\,\text{N·m/A}$,$R = 2\,\Omega$,施加 $V = 12\,\text{V}$。
失速扭矩:
$$ \tau_{stall} = \frac{0.05 \times 12}{2} = 0.3\,\text{N·m} $$
空載轉速:
$$ \omega_{NL} = \frac{12}{0.05} = 240\,\text{rad/s} \approx 2292\,\text{rpm} $$
這告訴設計者:這顆馬達啟動瞬間最多推 0.3 N·m,但全速時幾乎沒力。若你的應用需要在高速時仍有大扭矩,就得加減速齒輪箱(gearbox)——它用犧牲轉速的方式換取扭矩放大。
PWM:用「開關」控制連續的力量
我們怎麼控制施加在馬達上的「等效電壓」?直接用可變電阻調壓會浪費大量熱能。現代做法是脈寬調變(PWM, Pulse Width Modulation):以高頻率(如 20 kHz)快速開關電源,用「開的時間佔比」來決定平均電壓。這個佔比稱為占空比(duty cycle) $D$:
$$ V_{avg} = D \cdot V_{supply}, \qquad D = \frac{t_{on}}{t_{on} + t_{off}} $$
若 $V_{supply} = 12\,\text{V}$、$D = 0.6$,則馬達感受到的等效平均電壓為 $7.2\,\text{V}$。因為開關元件(MOSFET)要嘛全開(壓降近零)、要嘛全關(電流近零),功率損耗極小,效率遠高於線性調壓。PWM 是數位世界(只有 0 和 1)控制類比物理量(連續電壓)的橋樑,這正是嵌入式控制的精髓。
嵌入式運算:感測與致動之間的大腦
把感測與致動連起來的,是嵌入式系統(embedded system)——通常是一顆微控制器(MCU, Microcontroller Unit),如 ARM Cortex-M 或 ESP32。它週期性地執行一個控制迴圈(control loop):讀感測器 → 計算誤差 → 算出控制量 → 輸出 PWM → 等待下一週期。
這個迴圈以固定取樣週期(sampling period) $T_s$ 執行,例如 $T_s = 1\,\text{ms}$(即控制頻率 1 kHz)。最廣泛使用的控制律是 PID 控制器(Proportional-Integral-Derivative controller)。連續時間形式為:
$$ u(t) = K_p\, e(t) + K_i \int_0^t e(\tau)\, d\tau + K_d \frac{de(t)}{dt} $$
其中 $e(t) = r(t) - y(t)$ 是「目標值」減「實際值」的誤差。三項各有分工:
- 比例項(P):誤差越大,施力越大——快速反應,但單獨使用會有殘餘穩態誤差。
- 積分項(I):累積過去誤差——消除穩態誤差,但過強會造成超調與震盪。
- 微分項(D):看誤差變化趨勢——提供「煞車」效果,抑制超調,但會放大雜訊。
但 MCU 是數位的,無法做連續積分與微分,必須離散化(discretization)。用矩形近似積分、用向後差分近似微分:
$$ u[k] = K_p\, e[k] + K_i T_s \sum_{j=0}^{k} e[j] + \frac{K_d}{T_s}\big(e[k] - e[k-1]\big) $$
實作時,積分項通常用一個累加變數 $I[k] = I[k-1] + e[k]$ 遞迴更新,避免每次重算整個總和。這短短幾行算式,就是無數機電產品(從 3D 印表機的溫控、無人機的姿態穩定、到 CNC 工具機的進給控制)的共同心臟。
值得提醒:離散化引入了取樣延遲,且 $T_s$ 太大時系統可能不穩定。一般經驗法則是控制頻率至少要是系統頻寬的 10–20 倍,這又回到了前面的取樣定理。感測、運算、致動三者的時序,必須整體設計,這是機電整合與「純機械」或「純電子」最根本的差異。
看一個例子
讓我們把三個環節串起來,設計一個轉檯角度定位系統:用直流馬達驅動一個轉檯,要它精確轉到並停在 $90.0°$。
感測:用 12 位元絕對式編碼器(encoder)量測角度,$2^{12} = 4096$ 階對應 $360°$,解析度為
$$ \Delta\theta = \frac{360°}{4096} \approx 0.088° $$
足夠精確。
運算:MCU 以 $T_s = 1\,\text{ms}$ 執行 PID。假設此刻讀到實際角度 $\theta = 85.0°$,目標 $r = 90.0°$,誤差 $e[k] = 5.0°$。設 $K_p = 0.8$、$K_i = 0.05$、$K_d = 0.02$,前一誤差 $e[k-1] = 5.4°$,累積積分 $\sum e = 120°$。
比例項:$0.8 \times 5.0 = 4.0$ 積分項:$0.05 \times 0.001 \times 120 = 0.006$ 微分項:$\dfrac{0.02}{0.001} \times (5.0 - 5.4) = 20 \times (-0.4) = -8.0$
控制輸出:
$$ u[k] = 4.0 + 0.006 - 8.0 = -3.994 $$
微分項是負的,因為誤差正在縮小(5.4° → 5.0°),系統提前「踩煞車」防止衝過頭——這正是 D 項的價值。
致動:把 $u[k]$ 映射成 PWM 占空比並限幅(saturation)在 $[-1, 1]$(負代表反轉)。這裡 $u = -3.994$ 超出範圍,限幅為 $-1.0$,即馬達以全功率反向修正。實務上還會加上抗積分飽和(anti-windup)機制:當輸出飽和時凍結積分累加,避免積分項累積過頭導致大幅超調。
整個迴圈每毫秒重複一次。隨著 $\theta$ 逐漸逼近 $90°$,誤差變小、輸出變小,馬達平滑減速,最終穩穩停在目標。這就是電梯能精準停層、無人機能懸停、機械手臂能精準抓取的共同原理。
重點回顧
- 機電整合的本質是「感測—運算—致動」的閉環,而非機械與電子的簡單疊加;其關鍵在於三者的時序與精度必須整體設計。
- 感測把物理量經 ADC 數位化,解析度 $\Delta x = L / 2^n$ 受位元數限制;取樣頻率須滿足奈奎斯特定理 $f_s > 2 f_{max}$ 以避免混疊。
- 直流馬達的兩條方程式串起電與力學,扭矩–轉速為負斜率直線,端點是失速扭矩 $\tau_{stall}=KV/R$ 與空載轉速 $\omega_{NL}=V/K$;SI 制下 $K_t = K_e$ 是能量守恆的必然。
- PWM 用占空比 $D$ 控制等效電壓 $V_{avg}=D\,V_{supply}$,以高效率的開關方式讓數位訊號操控連續力量。
- 嵌入式 PID 是機電系統的大腦,離散化後在固定 $T_s$ 下執行;P 快、I 除穩態誤差、D 抑超調,並需 anti-windup 防積分飽和。
深入探討(研究所視角)
本文用「分項設計」的方式介紹各環節,但研究所層級的機電整合會把整個系統視為一個耦合的動態系統,並用更嚴謹的工具分析。
狀態空間與可控性。 PID 適合單輸入單輸出(SISO)系統,但多軸機器人、雙足平衡等是多輸入多輸出(MIMO)問題。此時改用狀態空間表示(state-space representation) $\dot{\mathbf{x}} = A\mathbf{x} + B\mathbf{u}$、$\mathbf{y} = C\mathbf{x}$。以前述馬達為例,取狀態 $\mathbf{x} = [\,i, \omega\,]^T$,可寫出 $2\times 2$ 的 $A$ 矩陣。系統是否「能被控制到任意狀態」由可控性矩陣(controllability matrix) $\mathcal{C} = [\,B, AB, A^2B, \dots\,]$ 的秩是否滿秩決定,這是設計狀態回授(state feedback) $\mathbf{u} = -K\mathbf{x}$ 與極點配置(pole placement)的前提。
最佳控制與估測。 當有多個性能指標要權衡(如能耗 vs. 速度),可用線性二次調節器(LQR, Linear Quadratic Regulator),最小化代價函數 $J = \int (\mathbf{x}^T Q \mathbf{x} + \mathbf{u}^T R \mathbf{u})\, dt$,其中 $Q$、$R$ 是設計者選定的權重矩陣,反映「狀態偏差」與「控制能量」孰輕孰重。而當感測器有雜訊、且部分狀態無法直接量測時,卡爾曼濾波器(Kalman filter) 結合系統模型與量測,遞迴地給出狀態的最佳估計——這在無人機姿態估測(融合陀螺儀與加速度計)中無所不在。
離散控制的穩定性邊界。 連續系統的穩定性看極點是否在 s 平面左半部;但數位實作後,要把系統轉到 z 域,穩定的條件變成所有極點落在單位圓內 $|z| < 1$。取樣週期 $T_s$ 直接影響極點位置——$T_s$ 越大,原本穩定的控制器可能跨出單位圓而失穩。這從理論上解釋了為何「控制頻率不能太低」,也是嵌入式工程師選 MCU 算力與排程時序的根本依據。
前沿方向。 近年機電整合與機器學習交會:用強化學習(reinforcement learning)直接學出控制策略以處理難以建模的非線性、用模型預測控制(MPC, Model Predictive Control)在每個時步求解一個帶約束的最佳化問題(已廣泛用於自駕車軌跡規劃)。但無論演算法多先進,最底層仍是本文的鐵律:感測決定你能看見什麼、致動決定你能改變什麼、而運算的時序決定這一切能否即時閉環。 理解這三者的物理極限與權衡,永遠是機電工程師最core的素養。