
為什麼再聰明的控制器,也躲不過這條「水床定律」?
從靈敏度函數、穩定裕度、時間延遲到 Bode 靈敏度積分,揭開回饋控制無法繞過的根本限制與數位實作的真實代價。
為什麼再聰明的控制器,也躲不過這條「水床定律」?
讀過入門篇後你已經知道:回饋(feedback)能讓系統自我修正,PID 三項各司其職,而穩定與否看極點的實部。但這裡有一個更尖銳的問題等著你:假設我擁有全世界最聰明的控制器,可以任意設計,那我能不能讓系統對所有頻率的擾動都完全免疫?
直覺上似乎可以——增益拉到無窮大,誤差不就被壓到零了嗎?答案是斬釘截鐵的「不行」。不是因為硬體不夠好,也不是因為演算法不夠聰明,而是因為一條深植在回饋數學結構裡的根本限制(fundamental limitation)。當你在某個頻段把擾動壓得更低,它必然會在另一個頻段「冒出來」變得更高,就像你壓一張水床(waterbed)的一邊,另一邊一定會鼓起來。這條「水床定律」有個正式名字:Bode 靈敏度積分定理(Bode sensitivity integral)。這篇文章,我們就深入回饋的頻域世界,看看它的優雅與它的天花板。
靈敏度函數:回饋到底「抵抗」了什麼
入門篇談的是「輸出追上參考值」。但實務上控制器更重要的工作,是抵抗擾動(disturbance rejection)——風吹動無人機、負載突然增加、感測器有雜訊。要量化這件事,我們需要兩個比閉迴路轉移函數更核心的物件。
設開迴路轉移函數 $L(s) = C(s)P(s)$(控制器乘受控體),定義靈敏度函數(sensitivity function):
$$ S(s) = \frac{1}{1 + L(s)} $$
以及互補靈敏度函數(complementary sensitivity function):
$$ T(s) = \frac{L(s)}{1 + L(s)} $$
這兩者最關鍵的性質,是它們處處互補:
$$ S(s) + T(s) = \frac{1}{1+L} + \frac{L}{1+L} = \frac{1+L}{1+L} = 1 $$
這條恆等式 $S + T = 1$ 看似平凡,卻是整套限制理論的源頭。它的物理意義是:
- $S(j\omega)$ 決定輸出擾動與參考誤差被壓制的程度。我們希望 $|S|$ 在低頻很小(誤差小、擾動被壓掉)。
- $T(j\omega)$ 決定參考追蹤與系統對量測雜訊的敏感度。我們希望 $|T|$ 在低頻接近 1(追得準),在高頻很小(不放大雜訊)。
問題來了:因為 $S + T = 1$,你不可能同時讓 $S$ 和 $T$ 在同一頻率都很小。在每個頻率,兩者之和被釘死在 1。這是第一層、也是最直白的取捨。
看一個例子
回到入門篇那個直流馬達 $P(s) = \dfrac{1}{s(s+2)}$,配純比例控制 $C(s) = K_p$。開迴路 $L(s) = \dfrac{K_p}{s(s+2)}$,靈敏度:
$$ S(s) = \frac{1}{1 + \frac{K_p}{s(s+2)}} = \frac{s(s+2)}{s^2 + 2s + K_p} $$
在低頻($s \to 0$),分子有因子 $s$,所以 $S(0) = 0$。這代表對直流(常值)擾動與參考,誤差被完全消除——這正是因為受控體含一個積分器 $1/s$。再看 $T(s) = \dfrac{K_p}{s^2+2s+K_p}$,$T(0)=1$,直流追蹤完美。
但在高頻($s \to \infty$),$L \to 0$,所以 $S \to 1$、$T \to 0$。高頻擾動完全沒被壓制($|S|\approx 1$),但好處是高頻雜訊也不會被放大($|T|\approx 0$)。低頻抵抗強、高頻放手——這就是一個典型回饋系統的「分工」。控制設計的藝術,很大程度上就是塑造 $|S(j\omega)|$ 與 $|T(j\omega)|$ 的形狀,這稱為迴路成形(loop shaping)。
穩定裕度:離災難還有幾步
入門篇提到增益裕度與相位裕度是「離不穩定還有多遠」的指標,但沒說它們怎麼算、為什麼是這兩個。現在我們把它講透。
穩定性的臨界點,在 Nyquist 圖上是 $-1$ 這個點:當 $L(j\omega) = -1$ 時,$1 + L = 0$,靈敏度 $S$ 爆炸,系統處於震盪邊緣。所以「離不穩定多遠」就是「$L(j\omega)$ 的軌跡離 $-1$ 點多遠」。我們用兩個量來測量這個距離:
相位裕度(phase margin)$\phi_m$:在增益穿越頻率(gain crossover frequency)$\omega_{gc}$——也就是 $|L(j\omega_{gc})| = 1$ 的頻率——量測相位距離 $-180°$ 還差多少:
$$ \phi_m = 180° + \angle L(j\omega_{gc}) $$
增益裕度(gain margin)$G_m$:在相位穿越頻率$\omega_{pc}$——也就是 $\angle L(j\omega_{pc}) = -180°$ 的頻率——量測增益還能放大幾倍才會碰到 1:
$$ G_m = \frac{1}{|L(j\omega_{pc})|} $$
直覺是這樣:當 $|L|=1$ 且相位剛好 $-180°$,$L = -1$,系統正好臨界震盪。相位裕度告訴你「相位還能再延遲多少」、增益裕度告訴你「增益還能再放大多少」,才會踩到那條紅線。實務上常要求 $\phi_m \gtrsim 45°$、$G_m \gtrsim 6\,\text{dB}$(約 2 倍)作為安全餘裕。
動手試試:時間延遲如何吃掉你的相位裕度
入門篇用洗澡水溫的「延遲」破題,但延遲到底如何在數學上摧毀穩定性?這裡我們算給你看,這也是純頻域分析最漂亮的地方。
一個純時間延遲 $\tau$ 在 Laplace 域是 $e^{-s\tau}$。它的頻率響應是 $e^{-j\omega\tau}$——振幅恆為 1,但相位隨頻率線性下滑:
$$ \left| e^{-j\omega\tau} \right| = 1, \qquad \angle e^{-j\omega\tau} = -\omega\tau \;\text{(弳度)} $$
關鍵在於:延遲不改變增益,所以增益穿越頻率 $\omega_{gc}$ 不變;但它額外扣掉 $\omega_{gc}\tau$ 的相位,直接侵蝕相位裕度。假設原本系統的相位裕度是 $\phi_m^0$,加入延遲後變成:
$$ \phi_m = \phi_m^0 - \omega_{gc}\tau \;\text{(弳度)} $$
當延遲大到把相位裕度吃光($\phi_m = 0$),系統就開始震盪。由此可以反推系統能容忍的最大延遲:
$$ \tau_{\max} = \frac{\phi_m^0}{\omega_{gc}} $$
舉個具體數字。某馬達速度迴路測得增益穿越頻率 $\omega_{gc} = 10\ \text{rad/s}$、原始相位裕度 $\phi_m^0 = 60° = 1.047\ \text{rad}$。它能容忍的最大延遲是:
$$ \tau_{\max} = \frac{1.047}{10} \approx 0.105\ \text{s} \approx 105\ \text{ms} $$
只要訊號鏈(感測器取樣、通訊、運算)的總延遲超過約 105 毫秒,這個原本好端端的系統就會失穩。這解釋了為什麼洗澡時你動作越慢、想越久才轉水龍頭,水溫反而越容易擺盪失控——你親手加大了回路裡的 $\tau$。也解釋了為什麼高效能伺服系統如此在意取樣率與運算延遲:每一毫秒的延遲,都在偷走你的相位裕度。
水床定律:你逃不掉的守恆
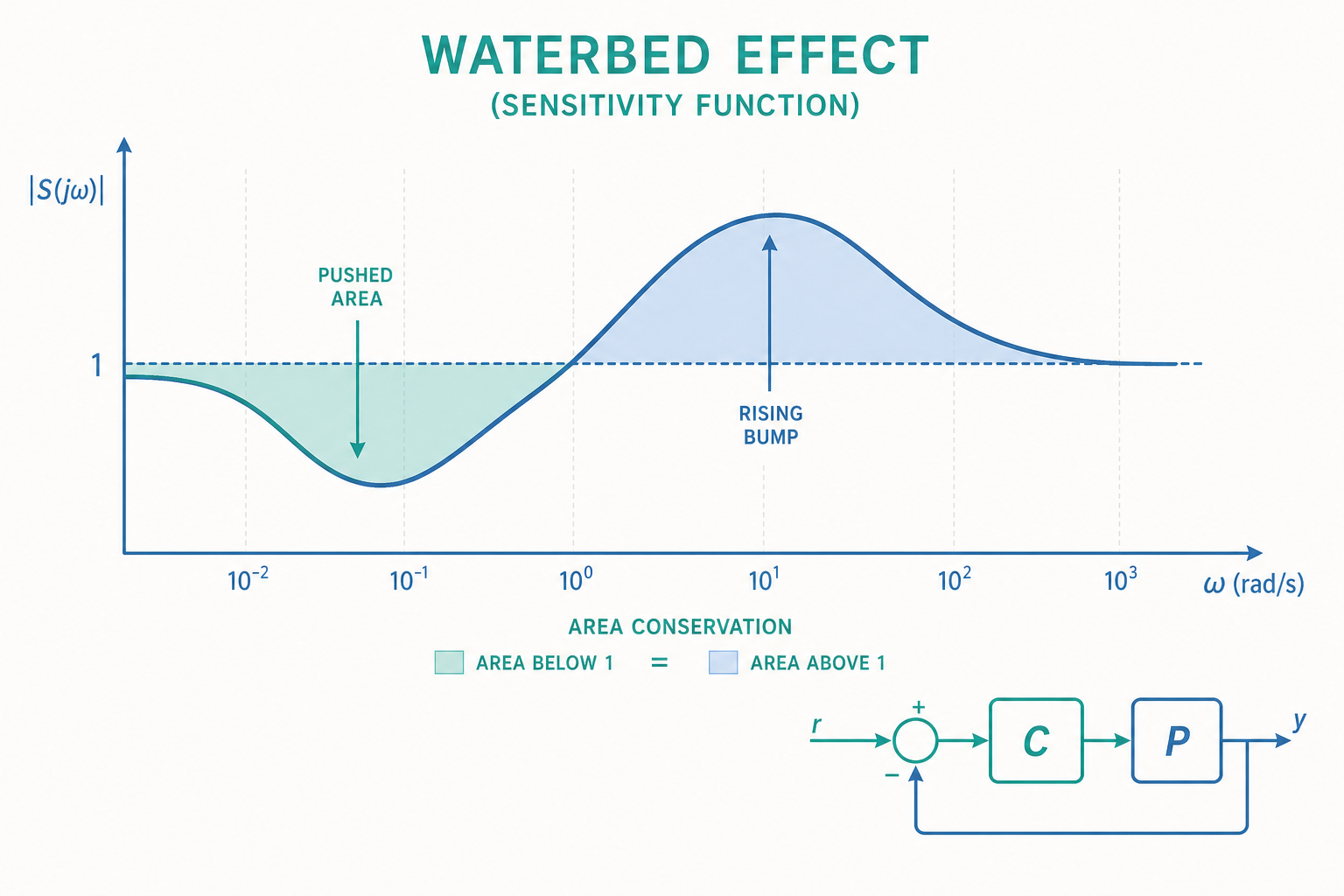
現在進入這篇文章的核心。我們已經知道在每個頻率 $S+T=1$,但還有一個更深、跨越所有頻率的守恆律。對一個開迴路 $L(s)$ 穩定(極點都在左半平面)且高頻衰減夠快的系統,Bode 靈敏度積分定理斷言:
$$ \int_0^\infty \ln|S(j\omega)|\,d\omega = 0 $$
讀懂這條式子需要一點工夫。$\ln|S|$ 在擾動被壓制的頻段是負的($|S|<1$,取對數為負),在擾動被放大的頻段是正的($|S|>1$)。積分為零意味著:負面積與正面積必須完全抵銷。
換句話說:你在低頻把 $|S|$ 壓得越低(負面積越大),就必然要在某個高頻段讓 $|S|$ 冒過 1(正面積補回來)。靈敏度的總量是守恆的,你只能搬動它,不能消滅它。這就是水床——壓下一邊,另一邊鼓起來。如果受控體還是不穩定的(右半平面有極點 $p_i$),情況更糟,積分還會被推到正值:
$$ \int_0^\infty \ln|S(j\omega)|\,d\omega = \pi \sum_i \mathrm{Re}(p_i) > 0 $$
也就是說,控制一個本質不穩定的系統(如倒立擺、戰機)必須付出更高的「靈敏度代價」。
這條定理的工程後果非常實際。當你把回路頻寬往上推、追求更快的響應,靈敏度的「鼓包」(peak of $|S|$)會被擠到頻寬邊緣並長高。$|S|$ 的最大值 $M_S = \max_\omega |S(j\omega)|$ 太大,代表系統對某頻段的擾動異常敏感、阻尼很差。而 $M_S$ 其實還和穩定裕度直接掛勾——可以證明:
$$ \phi_m \ge 2\arcsin\!\left(\frac{1}{2M_S}\right), \qquad G_m \ge \frac{M_S}{M_S - 1} $$
所以把 $|S|$ 的尖峰壓低(通常要求 $M_S < 2$,即 $6\,\text{dB}$)不只是為了抵抗擾動,本身就是在保證足夠的穩定裕度。這把入門篇的「裕度」、本文的「靈敏度」與「水床」全部串成一張網——它們是同一件事的不同切面。
從類比到數位:取樣本身就是一種延遲
最後一個入門篇沒碰、但現代每一台控制器都逃不掉的面向:今天的控制器幾乎全是數位的,跑在微控制器或 DSP 上,以固定週期 $T_s$ 取樣與輸出。連續時間的優雅理論,落地時都要面對離散化。
數位實作引入兩個新效應。其一,取樣等效於一段平均延遲約 $T_s/2$——根據前面的延遲分析,這直接扣相位裕度,所以取樣週期不能太長。經驗法則是取樣頻率至少是閉迴路頻寬的 20 到 30 倍,遠高於 Nyquist 取樣定理要求的 2 倍下限(因為控制要的是相位,不只是還原波形)。
其二,連續控制律必須離散化。以 PID 的積分與微分為例,最常用的是把微分換成後向差分(backward difference)、積分換成累加:
$$ \frac{de}{dt} \approx \frac{e[k] - e[k-1]}{T_s}, \qquad \int_0^t e\,d\tau \approx T_s \sum_{j=0}^{k} e[j] $$
於是離散 PID 的控制輸出寫成可以直接放進程式迴圈的形式:
$$ u[k] = K_p\, e[k] + K_i T_s \sum_{j=0}^{k} e[j] + \frac{K_d}{T_s}\big(e[k] - e[k-1]\big) $$
實作上還有兩個必須處理的坑。第一是積分飽和(integral windup):當致動器(如閥門、馬達電壓)已經到極限(飽和),誤差卻持續存在,積分項會一路狂飆累積;等誤差終於反向,這個巨大的積分量要花很久才「放完」,造成嚴重超越。對策是抗飽和(anti-windup)——致動器飽和時凍結或回拉積分項。第二是微分項對量測雜訊的放大,實務上會在微分前加一個低通濾波器,把純微分 $K_d s$ 改成 $\dfrac{K_d s}{1 + (T_d/N)s}$ 這種有限高頻增益的形式。
這些細節提醒我們:控制理論在紙上是連續、光滑、無限頻寬的;在晶片上卻是離散、量化、有飽和的。優秀的控制工程師,正是橫跨這兩個世界的人。
重點回顧
- 靈敏度函數 $S$ 與互補靈敏度 $T$ 滿足 $S+T=1$:擾動抵抗(要 $|S|$ 小)與雜訊抑制/追蹤(要 $|T|$ 的形狀)在每個頻率上是零和的取捨,控制設計就是塑造它們的頻率形狀(loop shaping)。
- 穩定裕度可由開迴路頻率響應直接計算:相位裕度 $\phi_m = 180° + \angle L(j\omega_{gc})$、增益裕度 $G_m = 1/|L(j\omega_{pc})|$,量測 Nyquist 軌跡離 $-1$ 點的距離。
- 時間延遲只扣相位、不動增益,能容忍的最大延遲 $\tau_{\max} = \phi_m^0/\omega_{gc}$;這把入門篇的「洗澡延遲擺盪」變成可計算的失穩條件。
- Bode 靈敏度積分(水床定律)$\int_0^\infty \ln|S|\,d\omega = 0$:靈敏度守恆,低頻壓得越低,高頻必然鼓起;不穩定極點還會讓代價更高。$M_S$ 尖峰同時界定了穩定裕度。
- 數位實作引入 $T_s/2$ 的取樣延遲與離散化議題:取樣率需達頻寬 20–30 倍,並要處理積分飽和(anti-windup)與微分雜訊濾波。
深入探討(研究所視角)
水床定律揭示了線性非時變(LTI)回饋的根本天花板,而研究所階段的控制學,很大一部分正是在問:這些限制能不能被繞過,代價是什麼?
第一條路是正視限制、把它寫進設計目標。$H_\infty$ 控制把「讓 $\|W_1 S\|_\infty$ 與 $\|W_2 T\|_\infty$ 同時夠小」當成最佳化問題,其中 $W_1, W_2$ 是頻率權重函數,等於用工程語言指定「我要在哪些頻段壓 $S$、哪些頻段壓 $T$」。靈敏度積分保證了它們無法同時在所有頻率都小,所以權重的選擇本質上是在水床上「決定鼓包要放哪裡」。$\mu$-合成($\mu$-synthesis)更進一步,在受控體有結構化不確定性時保證強健穩定。這條路的數學工具是凸優化與線性矩陣不等式(LMI),把控制設計變成可以數值求解的問題。
第二條路是跳出 LTI 框架,用非線性或時變策略換取超越線性限制的性能。模型預測控制(MPC, Model Predictive Control)在每個取樣時刻線上求解一個有限時域的最佳化問題,顯式地處理致動器與狀態的硬約束(如閥門開度、安全邊界)——這是頻域方法做不到的,也是 MPC 在製程工業、自駕車軌跡規劃大行其道的原因。代價是龐大的線上運算量。而自適應控制(adaptive control)讓控制器參數隨估測到的受控體變化而調整,強化學習控制(RL control)則更激進地用資料直接學出策略——但兩者都面臨穩定性保證難以嚴格證明的挑戰,這正是當前控制理論與機器學習交會處最熱門的研究前沿。
值得在離開前再強調一個觀念:所有這些先進方法,都沒有推翻水床定律。MPC 處理約束、$H_\infty$ 塑形頻率、RL 直接學策略,它們改變的是「如何分配」與「在什麼類別的系統上分配」靈敏度,而非廢除守恆本身。對線性系統,$\int \ln|S|\,d\omega$ 依然是零。理解這個天花板的存在,並學會在它底下做出聰明的取捨——而不是徒勞地想突破它——正是一位成熟控制工程師與初學者最根本的分野。從洗澡調水溫的那一刻起,這條看不見的守恆律,就一直在場。