
一根桿子上「不會動的那一點」,為什麼能決定整台機器的速度?
從瞬心(instantaneous center)與 Kennedy 三心定理出發,深入四連桿的傳動角、死點奇異位形、連桿曲線與 Freudenstein 運動合成。
一根桿子上「不會動的那一點」,為什麼能決定整台機器的速度?
你已經知道四連桿機構(four-bar linkage)能把馬達的連續旋轉變成雨刷的來回擺動,也算過向量迴路方程。但這裡有一個更深的問題:當整個機構正在運動、每根桿件、每一個點都有各自的速度時,平面上是否存在某一點,它在這個瞬間的速度恰好為零?
答案是肯定的——而且不只一個。這些「瞬間靜止的點」就是瞬心(instantaneous center of velocity, IC)。它們聽起來像幾何上的小把戲,卻是整個高等機構學的樞紐:從不用微分就能求出速度比,到判斷機構會不會卡死,再到設計一台機器的傳力品質,全都從瞬心展開。這篇進階文章,我們不再重複自由度與 Grashof 定則,而是直接走進機構學真正吃功夫的三個層面:瞬心與速度的幾何結構、傳動角與奇異位形、以及反問題——運動合成。
瞬心:剛體運動的幾何骨架
任何在平面上運動的剛體,在任一瞬間,它的運動都可以看成「繞某一點做純旋轉」。這個點就是該剛體的瞬時旋轉中心。即使剛體實際上又平移又旋轉,數學上總能找到一個(可能在剛體外、甚至在無窮遠的)點,使得此刻所有點的速度,都等於「該點到瞬心的位置向量」叉乘角速度:
$$ \vec{v}_P = \vec{\omega} \times \vec{r}_{P/IC}. $$
關鍵推論是:剛體上任一點的速度,方向必定垂直於它到瞬心的連線,大小則正比於它到瞬心的距離。這就是為什麼瞬心如此有用——它把「速度場」這件複雜的事,化簡成「到一個點的距離」這件純幾何的事。
對一個含 $n$ 根桿件的機構,任兩根桿件之間都存在一個相對瞬心。瞬心的總數由組合數給出:
$$ N = \frac{n(n-1)}{2}. $$
四連桿機構 $n=4$,故有 $N = 6$ 個瞬心。其中四個是「明顯」的——就是四個轉動對(revolute joint)本身,因為接頭處兩桿件速度相同,自然是它們的共同瞬心。剩下兩個「隱藏」的瞬心,要靠下面這條定理找出來。
Kennedy 三心定理
Kennedy 定理(Aronhold–Kennedy theorem)指出:任意三個做平面運動的剛體,它們兩兩之間的三個瞬心,必定共線。
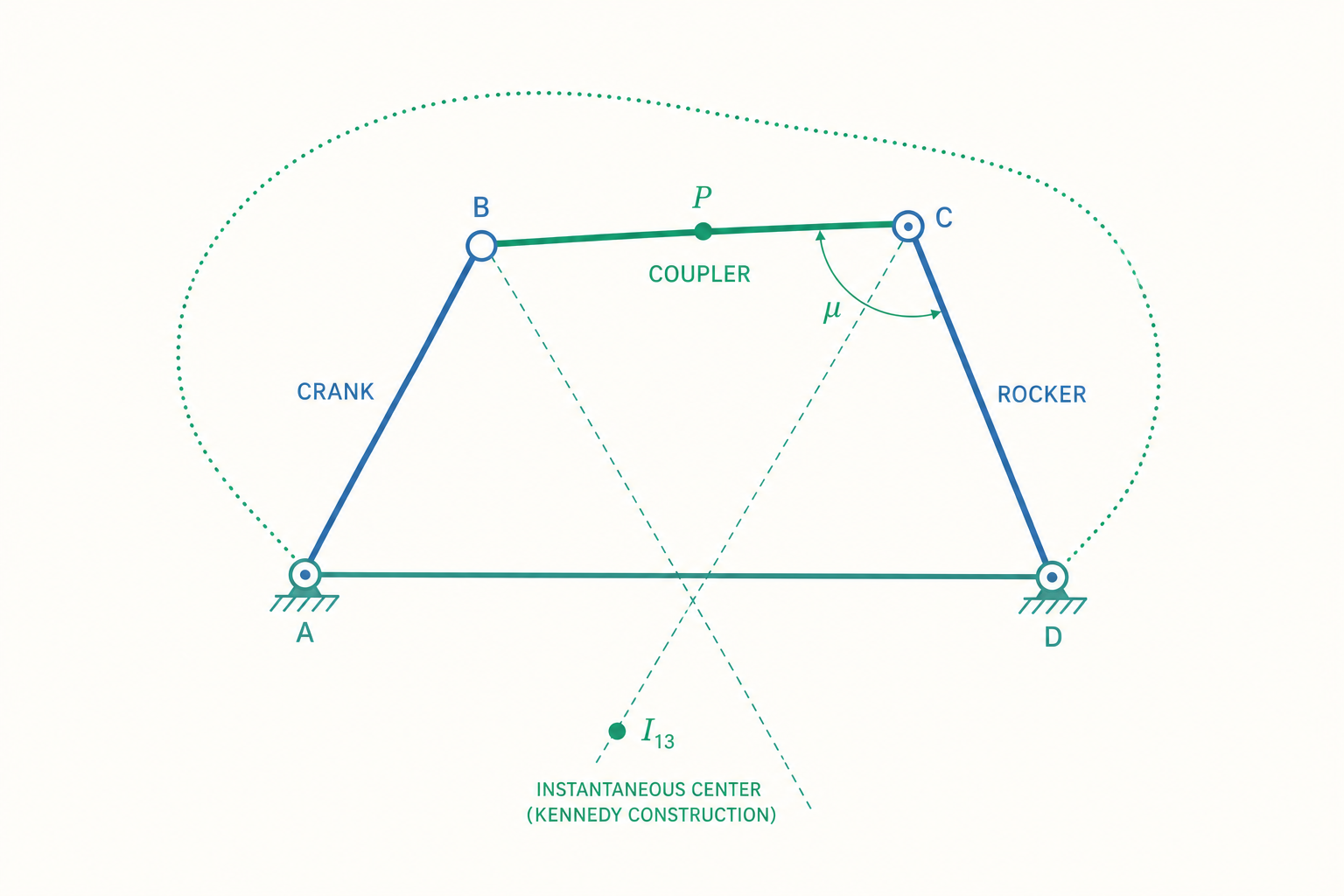
這條看似抽象的定理,是求隱藏瞬心的鑰匙。以四連桿(桿件編號:1 機架、2 曲柄、3 連桿、4 搖桿)為例,我們已知四個接頭瞬心 $IC_{12}, IC_{23}, IC_{34}, IC_{14}$。要找連桿與機架的相對瞬心 $IC_{13}$:
- 由桿件 1、2、3 共線:$IC_{13}$ 落在 $IC_{12}$ 與 $IC_{23}$ 的連線上。
- 由桿件 1、3、4 共線:$IC_{13}$ 落在 $IC_{14}$ 與 $IC_{34}$ 的連線上。
兩條線的交點,就是 $IC_{13}$。同理可定出 $IC_{24}$。整個過程完全不需要微分、不需要解三角方程,只要畫兩條線取交點。這正是瞬心法的魅力:把速度分析變成尺規作圖。
用瞬心一步求出速度比
找到瞬心後,速度分析快得驚人。考慮輸入桿(曲柄,桿 2)與輸出桿(搖桿,桿 4),它們相對於機架(桿 1)的角速度為 $\omega_2$、$\omega_4$。瞬心 $IC_{24}$ 是桿 2 與桿 4 的共同點——在這個瞬間,桿 2 上位於 $IC_{24}$ 的那一點,與桿 4 上位於同一位置的那一點,速度完全相同。
桿 2 把 $IC_{24}$ 視為繞 $IC_{12}$ 旋轉的一點,桿 4 把它視為繞 $IC_{14}$ 旋轉的一點。令兩者速度相等:
$$ \omega_2 \cdot \overline{IC_{12}\,IC_{24}} = \omega_4 \cdot \overline{IC_{14}\,IC_{24}}, $$
於是輸出輸入角速度比直接由兩段距離之比給出:
$$ \frac{\omega_4}{\omega_2} = \frac{\overline{IC_{12}\,IC_{24}}}{\overline{IC_{14}\,IC_{24}}}. $$
這就是著名的角速度比定理:兩桿件的角速度比,等於它們的共同瞬心到各自固定瞬心的距離之比。你不需要算 $\theta_3$、$\theta_4$,不需要建立速度迴路方程,量出三個瞬心的位置就能讀出傳動比。這在手算與直覺設計階段極為強大,也讓我們對機構在不同位形下「為什麼速度忽快忽慢」有了純幾何的解釋。
傳動角:一個常被忽略卻決定成敗的指標
入門課程關心機構「動不動得起來」,進階設計則關心它「動得好不好」。衡量四連桿傳力品質的核心指標是傳動角(transmission angle)$\mu$——它是連桿(桿 3)與輸出搖桿(桿 4)之間的夾角。
為什麼這個角度重要?因為連桿傳給搖桿的力,沿著連桿方向。這個力可以分解成兩個分量:垂直於搖桿的分量(有效地驅動搖桿轉動),以及沿著搖桿的分量(只是把搖桿往軸承裡推,純粹浪費、增加摩擦)。有效分量正比於 $\sin\mu$:
$$ T_{\text{out}} \propto \sin\mu. $$
當 $\mu = 90^\circ$ 時傳力效率最高;當 $\mu \to 0^\circ$ 或 $180^\circ$ 時,幾乎所有力都被軸承吃掉,機構可能卡死或需要極大的輸入力矩。工程經驗法則是讓傳動角全程維持在
$$ 40^\circ \lesssim \mu \lesssim 140^\circ. $$
傳動角可由餘弦定理求出。先用對角線 $d$(連接 $IC_{12}$ 與 $IC_{14}$)連結兩個三角形:在曲柄–機架三角形中,
$$ d^2 = r_1^2 + r_2^2 - 2 r_1 r_2 \cos\theta_2, $$
再在連桿–搖桿三角形中解出傳動角:
$$ \cos\mu = \frac{r_3^2 + r_4^2 - d^2}{2\, r_3 r_4}. $$
設計者會掃過整個輸入角範圍 $\theta_2 \in [0, 360^\circ)$,找出傳動角的最小值 $\mu_{\min}$,並以最大化 $\mu_{\min}$ 作為優化目標。這把「桿長選擇」從入門的 Grashof 可行性檢查,升級為一個真正的設計優化問題。
奇異位形與死點:當 Jacobian 退化
把四連桿的速度迴路方程整理成矩陣形式,會得到:
$$ \mathbf{A} \begin{bmatrix} \omega_3 \\ \omega_4 \end{bmatrix} = \mathbf{b}\,\omega_2, $$
其中係數矩陣(即 Jacobian $\mathbf{A}$)為:
$$ \mathbf{A} = \begin{bmatrix} -r_3\sin\theta_3 & r_4\sin\theta_4 \\ \ \ r_3\cos\theta_3 & -r_4\cos\theta_4 \end{bmatrix}. $$
它的行列式為:
$$ \det\mathbf{A} = r_3 r_4 \big(\sin\theta_3\cos\theta_4 - \cos\theta_3\sin\theta_4\big) = r_3 r_4 \sin(\theta_3 - \theta_4). $$
注意 $\theta_3 - \theta_4$ 正是連桿與搖桿的夾角,也就是傳動角 $\mu$(或其補角)。當 $\sin\mu = 0$,即 $\mu = 0^\circ$ 或 $180^\circ$——連桿與搖桿共線時,$\det\mathbf{A} = 0$,Jacobian 退化,速度方程無唯一解。這正是死點(toggle / dead-center position)。
死點在工程上是雙面刃。壞處是:在死點附近,輸入小小的轉動會引起輸出極劇烈的變化($\omega_4 \to \infty$ 的趨勢),控制困難。好處是:死點具有自鎖(self-locking)特性——折疊桌、鉗子夾持機構、飛機起落架的鎖定,全都刻意把機構停在死點附近,讓外力無論多大都無法把它推回去。可見傳動角、瞬心、Jacobian 行列式這三件事,在四連桿裡其實是同一個幾何現象的三種語言。
動手試試:判斷一組桿長的傳力品質
給定機架 $r_1 = 100$ mm、曲柄 $r_2 = 30$ mm、連桿 $r_3 = 90$ mm、搖桿 $r_4 = 80$ mm(與入門例題同一組桿長),檢驗它在最不利位形下的傳動角。
傳動角的極值出現在曲柄與機架共線的兩個位形:$\theta_2 = 0^\circ$(曲柄指向搖桿側,對角線最長)與 $\theta_2 = 180^\circ$(對角線最短)。
位形 A:$\theta_2 = 0^\circ$。 此時 $d = r_1 + r_2 = 130$ mm(外側極限):
$$ \cos\mu = \frac{r_3^2 + r_4^2 - d^2}{2 r_3 r_4} = \frac{90^2 + 80^2 - 130^2}{2 \times 90 \times 80} = \frac{8100 + 6400 - 16900}{14400} = \frac{-2400}{14400} = -0.1667, $$
$$ \mu = \arccos(-0.1667) \approx 99.6^\circ. $$
位形 B:$\theta_2 = 180^\circ$。 此時 $d = r_1 - r_2 = 70$ mm(內側極限):
$$ \cos\mu = \frac{90^2 + 80^2 - 70^2}{2 \times 90 \times 80} = \frac{8100 + 6400 - 4900}{14400} = \frac{9600}{14400} = 0.6667, $$
$$ \mu = \arccos(0.6667) \approx 48.2^\circ. $$
整個運動週期內傳動角在 $48.2^\circ$ 到 $99.6^\circ$ 之間擺動,最小值 $\mu_{\min} \approx 48.2^\circ$,落在建議的 $40^\circ$ 門檻之上。結論:這組桿長不僅滿足 Grashof(曲柄可整圈旋轉),傳力品質也合格——它是一個「能動、且動得好」的設計。若我們把搖桿縮短到 $r_4 = 50$ mm,重算位形 B 會得到 $\cos\mu = (8100+2500-4900)/(2\cdot90\cdot50) = 0.633$,$\mu_{\min} \approx 50.7^\circ$ 仍可,但若再過度縮短某根桿,$\mu_{\min}$ 會跌破門檻——這正是優化要避免的。
連桿曲線:四連桿藏著的「畫圖」天賦
四連桿還有一個入門少談、卻極富研究價值的面向:連桿曲線(coupler curve)。連桿(桿 3)上任一點 $P$(不在兩端接頭上)的軌跡,並不是圓,而是一條複雜的封閉曲線——數學上是一條六次代數曲線(sextic)。
連桿曲線的威力在於:透過巧妙選擇 $P$ 的位置與桿長,這條曲線可以近似直線、近似圓弧、出現尖點(cusp)或自交環(crunode)。歷史上著名的應用包括:
- 直線機構:Watt 連桿與 Chebyshev 連桿能讓某點走出近似直線段,這在沒有精密滑軌的蒸汽機時代是關鍵發明。
- 間歇與停留機構(dwell mechanism):當連桿曲線出現一段近似圓弧,把這段圓弧接到另一根桿上,就能讓輸出在一段時間內「幾乎不動」(dwell),常用於包裝機與縫紉機。
連桿點 $P$ 的位置可寫成連桿向量的線性組合,其軌跡座標 $(x_P, y_P)$ 是輸入角 $\theta_2$ 的函數。消去 $\theta_2$ 後得到的隱式方程,就是那條六次曲線——它的解析結構,正是「機構能畫出什麼形狀」這個古老問題的數學核心。
運動合成:從「分析」到「設計」的反問題
到目前為止,包括入門篇,我們做的都是運動分析(analysis):給定機構,求運動。研究所層級真正的挑戰是反過來的運動合成(synthesis):給定想要的運動,反求機構。
最經典的合成工具是 Freudenstein 方程。把四連桿的位置迴路方程實部、虛部相除整理,可以得到一條漂亮的代數關係:
$$ K_1\cos\theta_4 - K_2\cos\theta_2 + K_3 = \cos(\theta_2 - \theta_4), $$
其中三個係數只與桿長有關:
$$ K_1 = \frac{r_1}{r_2}, \qquad K_2 = \frac{r_1}{r_4}, \qquad K_3 = \frac{r_1^2 + r_2^2 - r_3^2 + r_4^2}{2\, r_2 r_4}. $$
這條方程的妙處在於:它把「機構幾何(桿長)」與「運動行為(輸入角 $\theta_2$ 對應輸出角 $\theta_4$)」分離開來。如果我們希望機構在三組指定的輸入–輸出角對 $(\theta_2^{(i)}, \theta_4^{(i)})$,$i = 1,2,3$ 上精確達成(這叫函數生成 function generation),就把三組角度代入 Freudenstein 方程,得到三條對 $K_1, K_2, K_3$ 的線性方程:
$$ \begin{bmatrix} \cos\theta_4^{(1)} & -\cos\theta_2^{(1)} & 1 \\ \cos\theta_4^{(2)} & -\cos\theta_2^{(2)} & 1 \\ \cos\theta_4^{(3)} & -\cos\theta_2^{(3)} & 1 \end{bmatrix} \begin{bmatrix} K_1 \\ K_2 \\ K_3 \end{bmatrix} = \begin{bmatrix} \cos(\theta_2^{(1)} - \theta_4^{(1)}) \\ \cos(\theta_2^{(2)} - \theta_4^{(2)}) \\ \cos(\theta_2^{(3)} - \theta_4^{(3)}) \end{bmatrix}. $$
解出 $K_1, K_2, K_3$,再反推桿長比例。這些被精確滿足的角度組,稱為精確點(precision points)。對三精確點問題,桿長有唯一解(在尺度自由下);想要滿足更多精確點,就得引入更複雜的方法,這時方程不再是線性的,需要 Burmester 理論或把問題化為多項式系統求解。
看一個例子:三點函數生成
假設我們要設計一個機械式角度換算機構,讓輸入轉盤與輸出指針在三個刻度上對齊:$(\theta_2, \theta_4)$ 分別為 $(30^\circ, 90^\circ)$、$(60^\circ, 105^\circ)$、$(90^\circ, 130^\circ)$。
把三組角度代入係數矩陣(以下取近似值,$\cos 30^\circ = 0.866$、$\cos 60^\circ = 0.5$、$\cos 90^\circ = 0$、$\cos 90^\circ=0$、$\cos 105^\circ = -0.259$、$\cos 130^\circ = -0.643$):
第一列:$0\cdot K_1 - 0.866\,K_2 + K_3 = \cos(30^\circ - 90^\circ) = \cos(-60^\circ) = 0.5$。
第二列:$-0.259\,K_1 - 0.5\,K_2 + K_3 = \cos(60^\circ - 105^\circ) = \cos(-45^\circ) = 0.707$。
第三列:$-0.643\,K_1 - 0\cdot K_2 + K_3 = \cos(90^\circ - 130^\circ) = \cos(-40^\circ) = 0.766$。
這是一組三元一次方程組。由第一列得 $K_3 = 0.5 + 0.866 K_2$。代入第三列:$-0.643 K_1 + 0.5 + 0.866 K_2 = 0.766 \Rightarrow -0.643 K_1 + 0.866 K_2 = 0.266$。代入第二列:$-0.259 K_1 - 0.5 K_2 + 0.5 + 0.866 K_2 = 0.707 \Rightarrow -0.259 K_1 + 0.366 K_2 = 0.207$。
解這兩條二元方程,得 $K_1 \approx 0.0$ 附近的小值、$K_2 \approx 0.57$、$K_3 \approx 0.99$(精確值依保留位數略有出入)。重點不在最後一位數,而在於:我們只解線性代數,就反求出了一台能在指定刻度上精確對齊的機構幾何。再由 $K_1 = r_1/r_2$ 等關係,設定機架長 $r_1 = 1$(標準化)後即可定出其餘桿長。這就是運動合成把「設計」變成「可計算」的核心精神。
重點回顧
- 瞬心是剛體運動的幾何骨架:剛體任一點的速度方向垂直於它到瞬心的連線,大小正比於距離;含 $n$ 桿的機構有 $n(n-1)/2$ 個瞬心。
- Kennedy 三心定理(三剛體的三瞬心共線)讓我們用純尺規作圖找出隱藏瞬心,再用角速度比定理 $\omega_4/\omega_2 = \overline{IC_{12}IC_{24}}/\overline{IC_{14}IC_{24}}$ 不必微分就讀出傳動比。
- 傳動角 $\mu$ 衡量傳力品質(有效扭矩 $\propto \sin\mu$),設計目標是最大化全週期的 $\mu_{\min}$,工程上維持在約 $40^\circ$–$140^\circ$。
- 死點對應速度 Jacobian 退化($\det\mathbf{A} = r_3 r_4 \sin\mu = 0$);它既是控制難點,也是折疊桌、起落架自鎖的設計利器。
- 連桿曲線是六次代數曲線,能近似直線或產生 dwell,是機構「畫形狀」能力的數學根源。
- 運動合成(Freudenstein 方程+精確點)把設計反問題化為線性代數,是從「分析機構」走向「生成機構」的橋樑。
深入探討(研究所視角)
把上述觀念再往前推,會接觸到當代計算運動學(computational kinematics)的幾個前沿。
全解運動合成與數值代數幾何。 三精確點之外的合成問題(四點、五點函數生成,乃至九點路徑生成)會化為高次多項式系統。Wampler、Morgan 與 Sommese 用同倫延拓(homotopy continuation)追蹤出 Burmester 問題的全部解——例如著名的「九點路徑合成」恰有 1442 組複數解。這把機構設計從牛頓法「找到一個解就停」,提升為「窮舉所有可行機構再從中挑選」,是數值代數幾何(numerical algebraic geometry)在工程上的標誌性應用。
奇異位形的微分幾何刻畫。 對平面四連桿而言死點是孤立的,但對並聯機器人(如 Stewart–Gough platform、Delta robot),奇異位形在工作空間中構成複雜的曲面。研究者用 Jacobian 的零空間、Grassmann 線幾何與螺旋理論(screw theory)來分類「輸入奇異」「輸出奇異」「結構奇異」三種退化,這直接決定機器人的可控工作空間邊界與動態力放大效應,是當前機器人學的活躍課題。
柔順機構與運動學的延伸。 傳統機構假設桿件絕對剛性、接頭無間隙。柔順機構(compliant mechanism)反其道而行,刻意用材料的彈性變形取代轉動接頭,於是「瞬心」變成連續分佈、「自由度」需用偽剛體模型(pseudo-rigid-body model)近似。這讓機構能被一體成形、零組裝、零摩擦地製造,是 MEMS 微機電與精密儀器的核心設計範式,也把純運動學與彈性力學重新縫合在一起。
從幾何到資料驅動設計。 最新趨勢是把運動合成交給最佳化與機器學習:以連桿曲線資料庫+傅立葉描述子做形狀檢索,或用生成模型直接「設計」出滿足目標軌跡的機構拓樸。這呼應了機械設計從 Freudenstein 的解析時代,邁向演算法自動生成的當代轉向——而本文反覆出現的瞬心、傳動角、Jacobian,依舊是這些演算法評估「一個機構好不好」時不可繞過的幾何度量。