
當振動「自己餵自己」:為什麼有些振動關掉外力卻停不下來?
從自激振動、非線性 Duffing 振子到旋轉機械的臨界轉速與隨機振動,走進線性 SDOF 理論之外的動力學前沿。
當振動「自己餵自己」:為什麼有些振動關掉外力卻停不下來?
入門篇裡,塔科馬大橋(Tacoma Narrows Bridge)的故事教會我們一件事:外力頻率踩中固有頻率,就會共振。但這個解釋其實藏著一個破綻——共振需要一個持續以固有頻率推送的週期性外力,可是 1940 年那天的風是穩定吹來的,並沒有以每秒幾次的節奏拍打橋面。一陣穩定的氣流,怎麼會精準地以橋的固有頻率激振它?
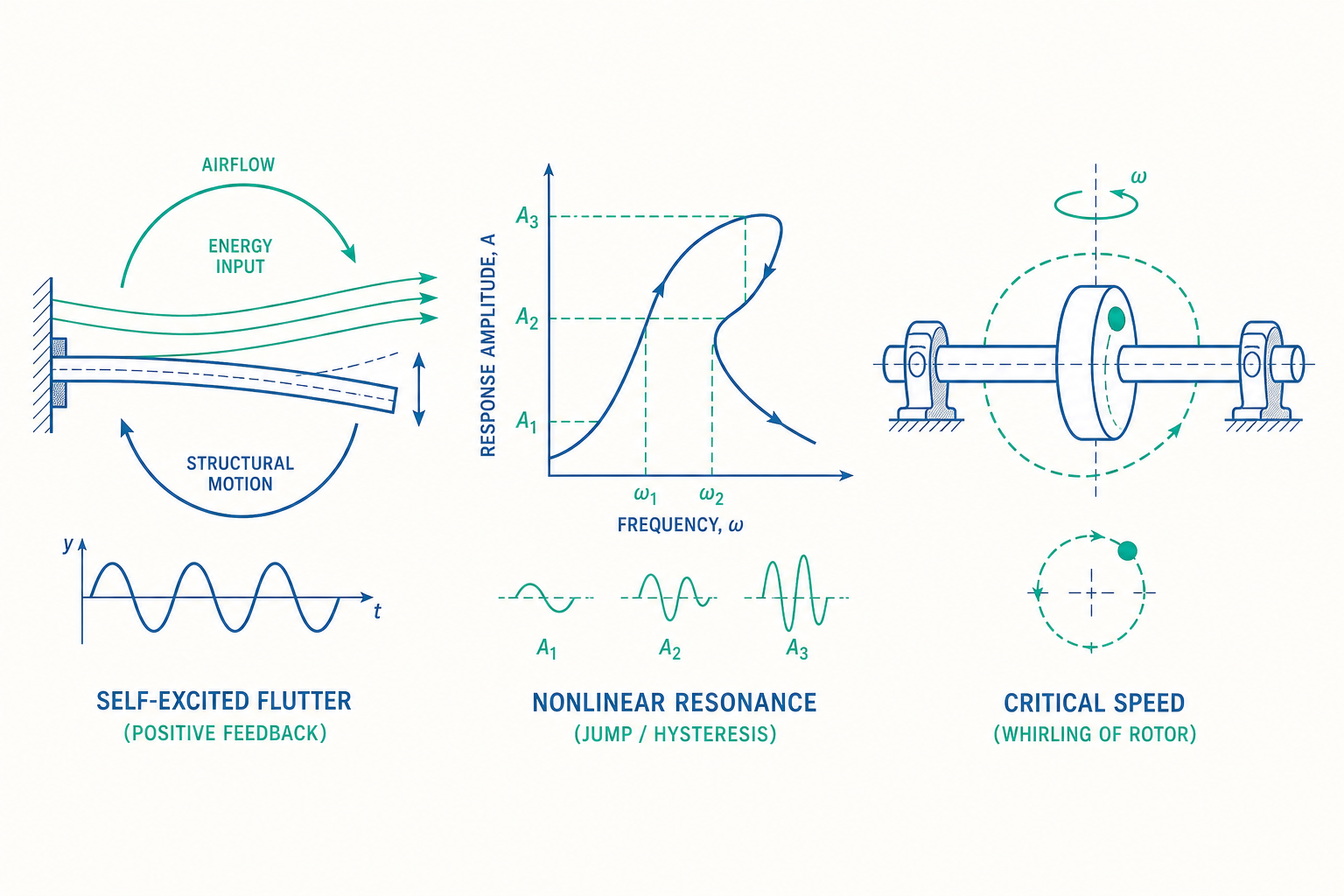
答案是:它根本不需要。真正的元兇是一類更深刻、也更危險的現象——自激振動(self-excited vibration)。在這類系統裡,能量的注入不是來自外界的節拍,而是來自結構自身的運動:橋一旦開始扭轉,氣流繞過變形後的斷面所產生的氣動力,恰好順著運動方向推一把,於是振動餵養振動,正回饋讓振幅指數成長。這篇進階文章,我們就離開「線性、被動、受迫」的舒適圈,走進振動學真正讓工程師夜不能寐的三個領域:自激振動、非線性振動、與旋轉機械動力學。
自激振動:負阻尼從哪裡來?
回顧標準的單自由度方程 $m\ddot{x} + c\dot{x} + kx = F(t)$。阻尼項 $c\dot{x}$ 之所以讓振動衰減,是因為它「逆著速度方向」消耗能量——$c$ 是正的。那麼,如果某種物理機制讓等效阻尼變成負的,會發生什麼事?
考慮一個沒有外力但阻尼為負的系統:
$$ m\ddot{x} - |c_{\text{eff}}|\dot{x} + kx = 0 \quad\Longrightarrow\quad \ddot{x} - 2\zeta_{\text{eff}}\omega_n\dot{x} + \omega_n^2 x = 0 $$
它的解是 $x(t) = X_0 e^{+|\zeta_{\text{eff}}|\omega_n t}\cos(\omega_d t - \phi)$。注意指數是正的——振幅不再衰減,而是指數發散。系統會自動以接近固有頻率 $\omega_d$ 的節奏振盪,而且愈振愈大。這就是自激振動的數學本質:某個物理過程提供了負阻尼,把能量持續注入系統。
負阻尼可以從很多地方冒出來:
- 氣動彈性顫振(flutter):機翼或橋面在氣流中振動時,升力的相位若落後於位移,氣動力就會對結構做正功。
- 乾摩擦致顫(friction-induced vibration):煞車尖叫、小提琴弓弦、機床滑台的爬行(stick-slip),都源於摩擦力隨速度下降(負斜率),等效於負阻尼。
- 流體輸送管的擺動、電力線的舞動(galloping):覆冰導線斷面變得不對稱,橫風下產生橫向不穩定氣動力。
判斷穩定性的關鍵,是看系統閉環的等效阻尼是否為正。這把問題從「振動學」推向了穩定性理論(stability theory)——我們不再只問「振多大」,而是問「會不會發散」。對線性化系統,這歸結為檢查特徵值的實部是否小於零(即 Routh–Hurwitz 判據)。
非線性振動:當疊加原理失效
入門篇的所有公式,都建立在一個沉默的假設上:系統是線性的。彈簧力嚴格正比於位移($F = kx$),所以方程可以漂亮地解、響應可以線性疊加、固有頻率是一個與振幅無關的常數。但真實世界裡,沒有彈簧能永遠線性——拉得夠大,材料會硬化或軟化;間隙、碰撞、大變形幾何效應,全都讓恢復力變成位移的非線性函數。
最經典的研究對象是 Duffing 振子,它在恢復力裡加了一個立方項:
$$ m\ddot{x} + c\dot{x} + kx + \alpha x^3 = F_0\cos(\omega t) $$
當 $\alpha > 0$ 是硬化彈簧(hardening),$\alpha < 0$ 是軟化彈簧(softening)。這一個看似無害的 $x^3$ 項,徹底顛覆了線性振動的世界觀:
1. 固有頻率隨振幅改變。 線性系統的 $\omega_n$ 是定值,但 Duffing 振子的「等效固有頻率」會隨振幅 $A$ 漂移。用近似法可得(硬化情形):
$$ \omega_{\text{eff}}^2 \approx \omega_n^2\left(1 + \frac{3\alpha A^2}{4k}\right) $$
振幅愈大,系統愈「硬」、頻率愈高。這意味著共振峰會向高頻彎曲(軟化則向低頻彎),不再是入門篇那條對稱的鐘形曲線。
2. 跳躍現象(jump phenomenon)。 共振曲線彎到一定程度後會「翻折」,在某個頻率區間內,同一個激振頻率竟然對應三個可能的穩態振幅(兩個穩定、一個不穩定)。當你緩慢增加激振頻率掃過這個區域,振幅會沿著上分支爬升,然後在某一點突然往下跳;反方向掃回來時,跳躍發生在另一個頻率——這就是遲滯(hysteresis)。汽車懸吊、MEMS 共振器、樂器都能觀察到這種「跳一下」的現象,它是線性理論完全無法預測的。
3. 次諧波、超諧波與混沌。 非線性系統在強激振下可能產生激振頻率 $1/2$、$1/3$ 的次諧波響應,甚至進入混沌(chaos)——對初始條件極度敏感、看似隨機卻完全確定的運動。這是非線性動力學的研究核心,遠超本文範圍,但值得知道它的存在:振動不一定是規律的正弦波。
看一個例子
一個硬化彈簧系統 $m = 1\ \text{kg}$、$k = 100\ \text{N/m}$、$\alpha = 2\times10^{5}\ \text{N/m}^3$。若振幅 $A = 0.02\ \text{m}$(2 cm),估算其等效固有頻率相對於小振幅線性值偏移多少。
線性固有頻率: $$ \omega_n = \sqrt{\frac{k}{m}} = \sqrt{\frac{100}{1}} = 10\ \text{rad/s} \quad(f_n \approx 1.59\ \text{Hz}) $$
非線性修正因子: $$ \frac{3\alpha A^2}{4k} = \frac{3\times(2\times10^5)\times(0.02)^2}{4\times100} = \frac{3\times2\times10^5\times4\times10^{-4}}{400} = \frac{240}{400} = 0.60 $$
等效固有頻率: $$ \omega_{\text{eff}} = \omega_n\sqrt{1+0.60} = 10\times\sqrt{1.60} \approx 12.6\ \text{rad/s} $$
也就是說,在 2 cm 振幅下,這個系統的「固有頻率」比小振幅時高了約 26%。若你用線性理論(10 rad/s)去設計避頻,等振幅一大、真正的共振點已經跑到 12.6 rad/s 去了——這正是為什麼非線性系統不能盲目套用線性避頻準則。實務上工程師會做「掃頻測試」並繪製振幅—頻率響應曲線,直接觀察峰值彎曲的方向與程度。
旋轉機械動力學:臨界轉速與轉子失衡
機械工程裡,最大宗的振動問題來自旋轉機械——馬達、渦輪、壓縮機、主軸。這裡的振動有個獨特的驅動源:轉子不可能完美平衡,質心永遠與旋轉軸心有微小偏心 $e$。當轉子以角速度 $\Omega$ 旋轉,這個偏心質量產生隨轉速平方成長的離心力:
$$ F_{\text{unbalance}} = m e\,\Omega^2 $$
最簡化的模型是 Jeffcott 轉子(單一圓盤裝在無質量彈性軸中央)。其穩態徑向偏移(轉軸中心相對於軸承連線的撓度)為:
$$ X = \frac{e\,r^2}{\sqrt{(1-r^2)^2 + (2\zeta r)^2}}, \qquad r = \frac{\Omega}{\omega_n} $$
形式上很像入門篇的放大係數,但分子多了 $r^2$(因為激振力本身正比於 $\Omega^2$)。這帶來兩個關鍵洞見:
1. 臨界轉速(critical speed)。 當 $r \to 1$(轉速等於固有頻率),分母趨近極小,撓度急遽放大——這個轉速稱為臨界轉速。轉子通過臨界轉速時會劇烈甩動(whirling),這也是為什麼大型渦輪啟動時要「快速通過」臨界轉速、不能在那裡停留。
2. 自定心效應(self-centering)。 當 $r \to \infty$(轉速遠高於臨界),$X \to e$,而且質心 $G$ 反而會繞到旋轉軸心內側——轉子「自動」繞著自己的質心旋轉,撓度趨於穩定。這就是超臨界運轉(supercritical operation):許多高速機械刻意設計成工作轉速遠高於第一臨界轉速,正是利用這個自定心特性。
旋轉機械還有一個入門篇沒提的維度:陀螺效應(gyroscopic effect)。高速旋轉的圓盤在橫向擺動時會產生陀螺力矩,使得前向渦動(forward whirl)與後向渦動(backward whirl)的固有頻率隨轉速分岔。把固有頻率對轉速作圖,就得到旋轉機械設計的核心工具——Campbell 圖(Campbell diagram),工程師用它找出激振線(如 $1\times$、$2\times$ 轉頻)與固有頻率曲線的交點,預測共振轉速。
動手試試
一根鋼製主軸,等效剛度 $k = 5\times10^6\ \text{N/m}$,中央圓盤質量 $m = 20\ \text{kg}$,殘餘偏心 $e = 50\ \mu\text{m}$,阻尼比 $\zeta = 0.03$。求臨界轉速,並比較工作轉速 6000 rpm 時的撓度。
步驟一:固有頻率(臨界轉速)。 $$ \omega_n = \sqrt{\frac{k}{m}} = \sqrt{\frac{5\times10^6}{20}} = \sqrt{2.5\times10^5} \approx 500\ \text{rad/s} $$ $$ N_{\text{cr}} = \frac{60\,\omega_n}{2\pi} = \frac{60\times500}{6.283} \approx 4775\ \text{rpm} $$
步驟二:工作轉速的頻率比。 6000 rpm 換算 $\Omega = \dfrac{2\pi\times6000}{60} \approx 628\ \text{rad/s}$: $$ r = \frac{\Omega}{\omega_n} = \frac{628}{500} \approx 1.26 $$
注意 $r \approx 1.26$ 落在臨界轉速($r=1$)之上,所以這是超臨界運轉,但還不算遠離臨界,要小心啟動過程。
步驟三:工作轉速撓度。 $$ X = \frac{e\,r^2}{\sqrt{(1-r^2)^2+(2\zeta r)^2}} = \frac{50\times1.26^2}{\sqrt{(1-1.59)^2+(2\times0.03\times1.26)^2}}\ \mu\text{m} $$ $$ = \frac{50\times1.59}{\sqrt{(-0.59)^2+(0.0756)^2}} = \frac{79.5}{\sqrt{0.348+0.0057}} = \frac{79.5}{0.595} \approx 134\ \mu\text{m} $$
步驟四:判讀。 工作轉速下撓度約 134 μm,是偏心量 $e=50\ \mu\text{m}$ 的約 2.7 倍——尚可接受。但啟動時轉速會掃過 4775 rpm 的臨界轉速,那一瞬間 $r=1$、撓度放大為 $X \approx e/(2\zeta) = 50/0.06 \approx 833\ \mu\text{m}$,是工作狀態的 6 倍以上!這就是為什麼此軸啟動時必須快速加速通過臨界轉速,並且阻尼($\zeta$)絕不能太低。
隨機振動:當激振不再是純正弦
汽車過坑、火箭發射、電子設備運輸——這些激振既不是簡諧、也不週期,而是隨機(random)的。對隨機振動,我們不再追蹤瞬時位移,而改用統計語言:以功率譜密度(Power Spectral Density, PSD) $S(\omega)$ 描述能量在各頻率的分布,以均方根值(RMS)描述振動「整體有多猛」。
線性系統的輸入—輸出關係變得極為優雅:輸出 PSD 等於輸入 PSD 乘上頻率響應函數模平方:
$$ S_{\text{out}}(\omega) = |H(\omega)|^2\,S_{\text{in}}(\omega) $$
工程上常用 Miles' 方程估算寬頻隨機激振下的響應 RMS 加速度(單位 $g$):
$$ a_{\text{rms}} = \sqrt{\frac{\pi}{2}\,f_n\,Q\,W} $$
其中 $f_n$ 是固有頻率、$Q = 1/(2\zeta)$ 是品質因子、$W$ 是激振加速度的 PSD($g^2/\text{Hz}$)。這條公式是航太與電子封裝振動測試的標準工具——它告訴我們,固有頻率愈高、阻尼愈低($Q$ 愈大),結構在隨機環境中承受的振動就愈猛,這也是為什麼降低 $Q$(增加阻尼)是隨機振動疲勞設計的首要手段。
重點回顧
- 自激振動靠的是「負等效阻尼」:能量由結構自身的運動透過某種物理回饋(氣動、摩擦)注入,無需週期性外力。塔科馬大橋的本質是顫振,不是單純受迫共振。
- 非線性振動讓固有頻率隨振幅漂移、共振峰彎曲、出現跳躍與遲滯,甚至次諧波與混沌——線性疊加原理與固定 $\omega_n$ 的假設全部失效。
- 旋轉機械的激振力 $me\Omega^2$ 隨轉速平方成長;臨界轉速($r=1$)必須快速通過,超臨界運轉則利用自定心效應穩定下來。
- 陀螺效應使前向/後向渦動頻率隨轉速分岔,Campbell 圖是預測旋轉共振的核心工具。
- 隨機振動以 PSD 與 RMS 描述;Miles' 方程顯示高 $Q$(低阻尼)會放大隨機響應,增加阻尼是疲勞防護的關鍵。
深入探討(研究所視角)
本文的非線性與自激振動,在研究所層級會被統一納入動力系統理論(dynamical systems theory)的框架。把二階方程改寫成一階狀態空間 $\dot{\mathbf{z}} = \mathbf{f}(\mathbf{z},t)$ 後,振動問題就變成在相空間(phase space)裡研究軌跡的幾何。自激振動對應的是極限環(limit cycle)——一條孤立的閉合軌跡,系統會自動被它吸引,振幅由非線性飽和效應決定,而非初始條件。最經典的範例是 Van der Pol 振子 $\ddot{x} - \mu(1-x^2)\dot{x} + x = 0$:小振幅時 $(1-x^2)>0$ 提供負阻尼讓振動成長,大振幅時阻尼轉正讓振動受限,兩者平衡出一個穩定的極限環。煞車尖叫、提琴發聲、某些燃燒不穩定,數學上都是 Van der Pol 型的極限環振動。
從穩定性的角度,系統參數變化導致定性行為突變的臨界點,稱為分岔(bifurcation)。當一對共軛特徵值穿越虛軸,穩定平衡點失穩、誕生出極限環,這就是 Hopf 分岔——它精確描述了「轉速一旦超過某臨界值,原本安靜的轉子突然開始自激甩動」這類失穩的數學機制(如滑動軸承的油膜渦動 oil whirl/whip)。再往前推,週期倍增分岔(period-doubling)的串級最終會通向混沌,這也是為什麼旋轉機械、流固耦合、加工顫振的研究都離不開非線性動力學。
至於連續體與複雜結構,現代工程的主力工具是有限元素法(FEM)搭配模型降階(model order reduction):先在數值模型上求出數萬自由度的模態,再投影到少數主導模態構成的降階模型,使非線性時域模擬與控制設計變得可行。而在實驗端,運轉模態分析(Operational Modal Analysis, OMA) 能在機器正常運轉、無法人為敲擊的情況下,僅憑輸出響應反推模態參數。最後值得一提的是主動振動控制(active vibration control)——用感測器、致動器與即時控制律(如 LQR、$H_\infty$)人為注入「正阻尼」,主動抵銷振動。它把振動學與控制理論真正縫合在一起,也是智慧結構(smart structures)、自適應光學與精密製造的共同前沿。線性 SDOF 模型是這一切的起點,但真正的研究天地,從「非線性」與「耦合」這兩個詞開始展開。