
為什麼台北的同一條路口,尖峰時要等三個紅燈?
從車流三變數、Greenshields 容量模型到號誌延滯與服務水準,理解運輸工程如何在有限路權下分配時間與空間。
為什麼台北的同一條路口,尖峰時要等三個紅燈?
每天早上八點,你站在台北市某個十字路口,明明綠燈亮了,卻因為前方車陣動彈不得,連續等了三次號誌才通過。這不是駕駛技術問題,而是一個典型的運輸工程(Transportation Engineering)問題:在有限的道路空間裡,需求(車流)超過了供給(路口的通行能力)。運輸工程師的工作,正是用量化的方法去描述車流、預測需求、設計道路幾何與號誌時制,讓人與物在城市裡安全、有效率、且公平地移動。
運輸工程橫跨土木工程與都市規劃,往下接觸鋪面材料與結構,往上連結交通規劃(Transportation Planning)與政策。它不只是「把路鋪寬一點」,而是涉及流量理論、容量分析、號誌最佳化,以及在台灣這種高人口密度、多機車、又位於地震帶的特殊環境下,如何兼顧防災與永續。這篇文章帶你從最基本的車流三變數出發,一路走到容量分析與號誌設計,並看看研究所層級會關心哪些更深的問題。
車流的三個基本變數:流量、速率與密度
要描述一條道路上的車流,運輸工程用三個巨觀(macroscopic)變數:
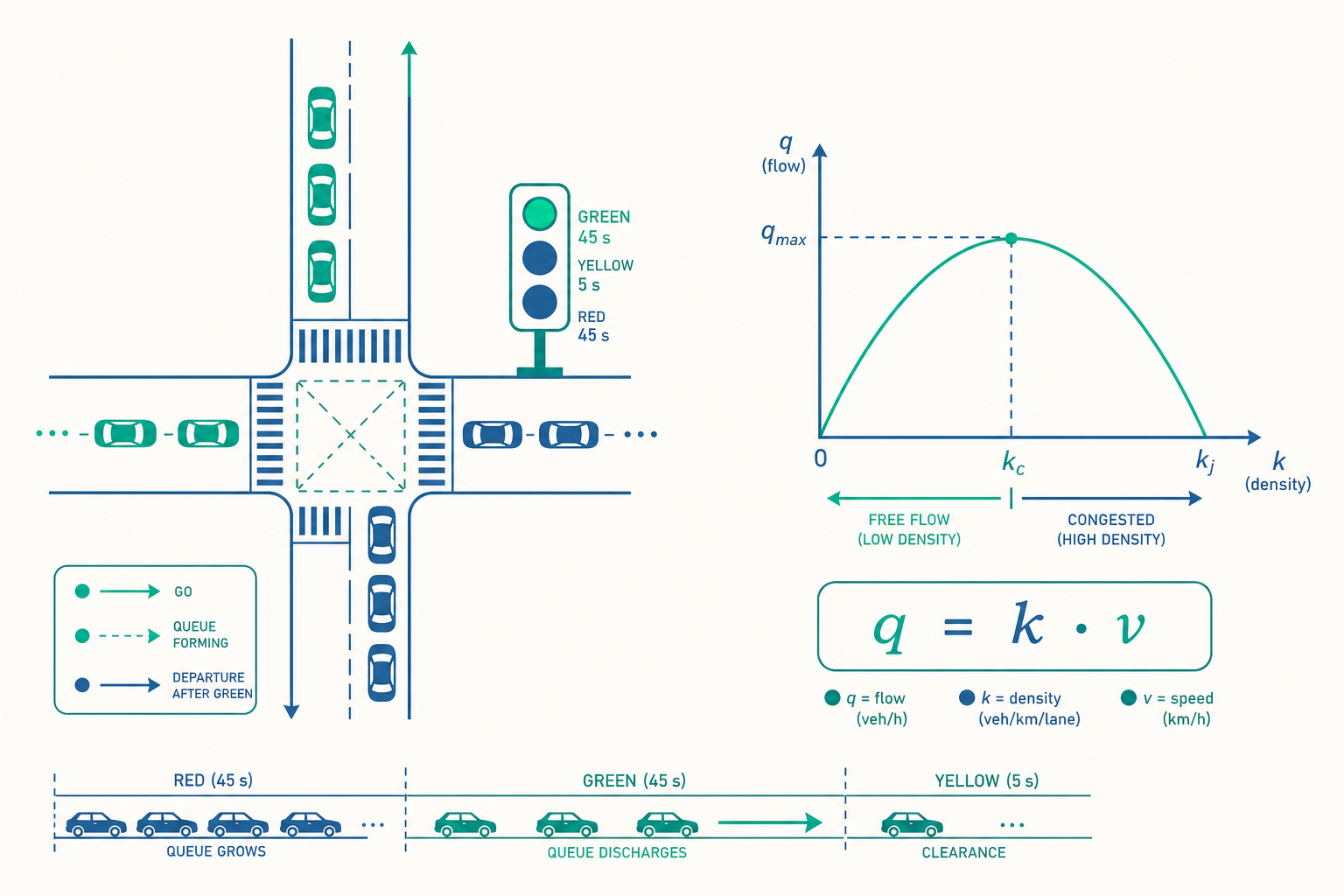
- 流量(Flow, $q$):單位時間通過某斷面的車輛數,單位常用「輛/小時」(veh/h)。
- 速率(Speed, $v$):車輛的平均行駛速率,單位「公里/小時」(km/h)。這裡通常指空間平均速率(space-mean speed)。
- 密度(Density, $k$):單位長度道路上的車輛數,單位「輛/公里」(veh/km)。
這三者並非各自獨立,而是由一條基本的恆等式連結,稱為車流基本關係式(fundamental relation of traffic flow):
$$ q = k \cdot v $$
這個式子的直覺很簡單:每公里有多少車(密度),乘上每小時走多少公里(速率),就是每小時通過的車數(流量)。它和流體力學的「流量=密度×流速」是同一個概念。
舉個例子,若某路段密度 $k = 40$ 輛/公里,平均速率 $v = 60$ 公里/小時,則流量為
$$ q = 40 \times 60 = 2400 \ \text{veh/h} $$
速率—密度關係與最大流量
實務上速率與密度並非互相獨立。當路上車很少(密度低)時,大家可以開到接近自由流速率(free-flow speed, $v_f$);當車愈來愈多(密度升高),彼此干擾使速率下降;直到密度達到壅塞密度(jam density, $k_j$)時,車輛保險桿貼保險桿,速率趨近於零。
最經典的模型是 Greenshields 線性模型,假設速率與密度呈線性遞減:
$$ v = v_f \left( 1 - \frac{k}{k_j} \right) $$
把它代入 $q = k v$,得到流量與密度的關係:
$$ q = v_f \left( k - \frac{k^2}{k_j} \right) $$
這是一條開口向下的拋物線。對 $k$ 微分並令其為零,可求出使流量最大的密度:
$$ \frac{dq}{dk} = v_f \left( 1 - \frac{2k}{k_j} \right) = 0 \quad \Rightarrow \quad k_m = \frac{k_j}{2} $$
也就是說,最大流量發生在密度等於壅塞密度的一半時。對應的速率為自由流速率的一半 $v_m = v_f / 2$,而最大流量(即道路的容量, capacity)為:
$$ q_{max} = k_m \cdot v_m = \frac{k_j}{2} \cdot \frac{v_f}{2} = \frac{v_f \, k_j}{4} $$
這個結果有個很重要的啟示:車開得最快的時候,路並不是用得最有效率的時候。當大家飆到自由流速率時,路上車很少,流量其實偏低;真正讓一條路「載最多車」的,是中等的速率與中等的密度。這也是為什麼高速公路匝道儀控(ramp metering)要刻意限制進入車流,避免主線密度超過 $k_m$ 而崩潰進入壅塞區。
號誌路口的容量與飽和流率
都市道路的瓶頸往往不在路段,而在號誌化路口(signalized intersection)。一個路口在一個號誌週期裡,每個方向只分到一段綠燈,因此它的有效通行能力遠低於路段。
關鍵參數是飽和流率(saturation flow rate, $s$):假設綠燈一直亮著、車隊源源不絕,每小時每車道能通過的車輛數,台灣都會區一般取約 $s \approx 1800$ 輛/小時/車道。但實際綠燈只佔週期的一部分,所以某車道群的容量為:
$$ c = s \cdot \frac{g}{C} $$
其中 $g$ 是有效綠燈時間(effective green time),$C$ 是號誌週期長度(cycle length),$g/C$ 稱為綠燈比(green ratio)。
評估路口服務水準時,常用 $v/c$ 比(流量對容量比,又稱飽和度 degree of saturation, $X$):
$$ X = \frac{v}{c} = \frac{v \cdot C}{s \cdot g} $$
當 $X$ 接近 1,代表這個方向已逼近容量上限,延滯急遽上升;超過 1 則表示需求超過供給,車隊會跨週期累積——這正是文章開頭「等三個紅燈」的數學原因。
號誌延滯與服務水準
路口的服務品質用平均控制延滯(average control delay, $d$)衡量,單位是秒/車。美國《道路容量手冊》(Highway Capacity Manual, HCM)把延滯拆成均勻延滯與隨機(增量)延滯。其中均勻延滯(uniform delay, $d_1$)假設車流均勻到達,可寫成:
$$ d_1 = \frac{0.5 \, C \left( 1 - \frac{g}{C} \right)^2}{1 - \left[ \min(X, 1) \cdot \frac{g}{C} \right]} $$
延滯算出後,依數值大小分為 A 到 F 六個服務水準(Level of Service, LOS)等級:A 表示延滯極短、暢行無阻;F 表示嚴重壅塞、延滯超過 80 秒/車。台灣都會區尖峰的主要幹道路口,常落在 D 到 F 之間。
看一個例子
某市區號誌路口的東向直行車道群,已知條件如下:
- 飽和流率 $s = 1800$ 輛/小時/車道
- 號誌週期 $C = 90$ 秒
- 該方向有效綠燈時間 $g = 36$ 秒
- 尖峰小時到達流量 $v = 600$ 輛/小時(單車道)
步驟一:計算綠燈比與容量
$$ \frac{g}{C} = \frac{36}{90} = 0.40 $$
$$ c = s \cdot \frac{g}{C} = 1800 \times 0.40 = 720 \ \text{veh/h} $$
步驟二:計算飽和度 $X$
$$ X = \frac{v}{c} = \frac{600}{720} \approx 0.833 $$
$X$ 約為 0.83,尚未飽和,但已偏高,代表這個方向在尖峰時相當吃緊。
步驟三:計算均勻延滯
$$ d_1 = \frac{0.5 \times 90 \times (1 - 0.40)^2}{1 - (0.833 \times 0.40)} = \frac{45 \times 0.36}{1 - 0.333} = \frac{16.2}{0.667} \approx 24.3 \ \text{秒/車} $$
每輛車平均要承受約 24 秒的均勻延滯,對照 HCM 的 LOS 分級,約落在 LOS C(延滯 20–35 秒)。若再加上隨機延滯與台灣特有的機車鑽行干擾,實際感受可能更接近 D 級。
步驟四:政策意涵
若想改善,工程師可以調整綠燈比(給東向更多綠燈,但會排擠其他方向)、縮短週期,或從需求面著手(鼓勵大眾運輸、調整路口轉向設計)。任何一個調整都是「拆東牆補西牆」,這也是號誌最佳化的核心難題:在多個衝突方向之間分配有限的時間資源。
台灣環境的特殊考量:機車、地震與永續
台灣的運輸工程有幾個不能忽視的在地條件:
機車混合車流。 台灣機車密度極高,停等時的「機車待轉區」與綠燈起步時的鑽行行為,使傳統以小客車為基準的飽和流率模型需要修正。實務上會用「機車當量(motorcycle equivalent)」或專門的混合車流模型,避免高估或低估容量。
地震與生命線系統。 道路與橋梁是震災後的「生命線(lifeline)」,承擔救災與疏散功能。台灣位於環太平洋地震帶,公路橋梁須依《公路橋梁耐震設計規範》設計,並考慮土壤液化潛勢區的路基處理。一旦主要橋梁在強震中受損,整個路網的疏散與救援都會癱瘓,因此關鍵路段的耐震補強是運輸防災規劃的重點。
永續與淨零。 運輸部門是溫室氣體排放大宗。從號誌連鎖(signal coordination,俗稱「綠波帶」)減少停等怠速,到推動公共運輸導向發展(Transit-Oriented Development, TOD)與電動運具,運輸工程正逐步把「碳排」納入路網設計的目標函數,而不只是追求車速。
重點回顧
- 車流三變數由 $q = k \cdot v$ 連結:流量等於密度乘速率,是所有車流分析的起點。
- 最大流量不在最高速率時發生:依 Greenshields 模型,容量出現在密度為壅塞密度一半($k_m = k_j/2$)、速率為自由流一半時,$q_{max} = v_f k_j / 4$。
- 號誌路口容量受綠燈比限制:$c = s \cdot (g/C)$,飽和度 $X = v/c$ 是判斷路口是否瀕臨壅塞的關鍵指標。
- 延滯決定服務水準:均勻延滯公式把週期、綠燈比與飽和度連起來,再依 LOS A–F 分級評估品質。
- 台灣情境需在地修正:高機車比例、地震生命線需求與淨零目標,都讓運輸工程超越單純的車速最佳化。
深入探討(研究所視角)
進入研究所層級,運輸工程的問題會從「描述單一路段/路口」躍升到「理解整個動態網路」,以下幾個方向值得關注:
動態車流模型與激波理論(Shockwave Theory)。 巨觀車流可用偏微分方程描述,最經典的是 LWR 模型(Lighthill–Whitham–Richards),其守恆方程為
$$ \frac{\partial k}{\partial t} + \frac{\partial q}{\partial x} = 0 $$
配合基本圖(fundamental diagram)$q = Q(k)$,可解析出車流中「壅塞波」的傳播速率:兩個狀態交界處的激波速率為
$$ u_w = \frac{q_2 - q_1}{k_2 - k_1} $$
當 $u_w$ 為負,代表壅塞由前向後傳播——這解釋了為什麼塞車的「車尾」會逆著車流方向不斷往後延伸。研究所會進一步探討二階模型(如 Payne–Whitham、ARZ 模型)如何修正 LWR 無法描述的「走走停停(stop-and-go)」現象。
需求預測的四階段模式。 交通規劃的骨幹是四階段需求模式(four-step model):旅次發生(trip generation)、旅次分布(trip distribution,常用重力模型)、運具分配(mode choice,常用 logit 模型)、路網指派(traffic assignment,常用 Wardrop 使用者均衡)。其中使用者均衡(User Equilibrium)的核心是 Wardrop 第一原理:在均衡狀態下,所有被使用路徑的旅行時間相等且最小,這可化為一個凸性最佳化問題求解。
號誌最佳化與網路控制。 從單點號誌的 Webster 最佳週期公式
$$ C_o = \frac{1.5 L + 5}{1 - Y} $$
(其中 $L$ 為總損失時間,$Y$ 為各相位臨界流量比之和),到區域協調控制、適應性號誌(adaptive signal control),乃至近年以強化學習(reinforcement learning)做即時號誌調控,都是活躍的研究領域。
新興主題。 自駕車(autonomous vehicles)與車聯網(V2X)如何改變飽和流率與跟車行為?共享移動(shared mobility)與 MaaS(Mobility as a Service)如何納入傳統需求模式?以及在氣候變遷下,如何把韌性(resilience)與碳排明確寫進路網設計的目標函數?這些問題把運輸工程從「土木的一個分支」推向資料科學、最佳化與公共政策的交會點,也是當代研究最有活力的前沿。